
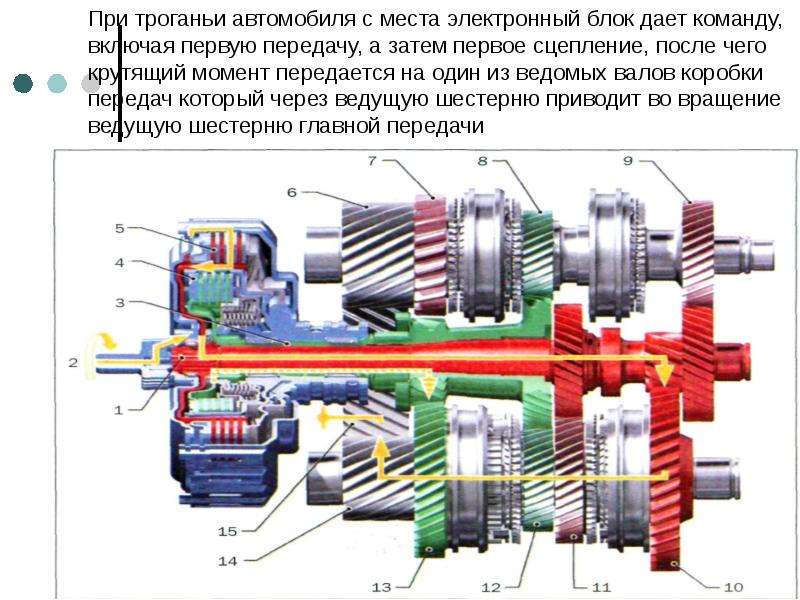
Роботизированная коробка передач плюсы и минусы
Многим сейчас известно, что много иностранных современных автомобилей выпускаются с автоматической КПП. Однако те водители, которые ездили на автомате, прекрасно чувствуют разницу, как такая коробка уступает «механике» в скорости разгона автомашины, и еще, что немаловажно, в экономичности горючего. Поскольку автоматическая коробка передач непосредственно в момент переключения несколько секунд «думает», и происходит повышенный топливный расход. Расходуется больше горючего и во набора скорости при разгоне.
Исходя из анализа обеих популярных КПП, специалистами была разработана так называемая роботизированная коробка передач, получившая в простонародье название довольно простое «робот». А многие ли знают, что это такое? Все не так-то и сложно, обозначенное устройство собой представляет классическую МКПП, однако она по понятным причинам относится к классу АКПП. Большое отличие от «механики» заключается в следующем: она отпускает сцепление, практически моментально включает передачу, а роботизированная современная трансмиссия обладает сцеплением, только уже в автоматическом режиме.
Как устроена роботизированная коробка передач
Даже те, кто прекрасно знают и понимают, что это такое плюс что представляет собой набирающая стремительно популярность роботизированная коробка передач, до конца не понятно как все устроено, и чем она отличается от «автомата». Ранее вкратце было сказано, что данное устройство самостоятельно отпускает сцепление, точно также, как бы это было при механике, но только выжимает его в таком случае водитель, и моментом включает передачу, осуществляется это посредством специального блока питания, отправляющего соответствующие команды 2-ум современным сервоприводам. Сам водитель и его манера езды для устройства автомобильной РКПП своими действиями формируют соответствующую информацию, на основе которой роботизированная КПП будет работать. Полностью управление роботом берет на себя специализированный электронный блок, работающий по определенному, заложенному специалистами алгоритму.
Бывают такие моменты в эксплуатации автомобиля что вам нужен не один мастер а скажем сразу и электрик и ходовик, вам на помощь придет автосервис Сенатор полного цикла ремонта авто, вам там помогут отремонтировать сразу все возможные поломки в авто.
Специалисты уверяют, РКПП принадлежит к серии «автомат», по той причине, что когда хотя бы 1 из процессов в коробке автоматизировано, то он соответственно и относится к этой категории. Основой для робота послужила классическая механическая коробка, оснащенная электронным блоком, но по конструкции они в любом случае имеют свои отличия и специфику.
Продолжаем выяснять, что это такое «робот». Любая автоматическая трансмиссия имеет фрикционное сцепление. Как правило, установлен дисковое сцепление, или же целый пакет фрикционных дисков. На РКПП в более современном исполнении установлено 2 таких диска сцепления, и это как раз позволяет без какой-либо потери мощности своевременно и точно передачи переключать.
Как правило, установлен дисковое сцепление, или же целый пакет фрикционных дисков. На РКПП в более современном исполнении установлено 2 таких диска сцепления, и это как раз позволяет без какой-либо потери мощности своевременно и точно передачи переключать.
Самое главное, чем отличаются современные «роботы» — по отпуску сцепления, плюс по приводу переключения скоростей. Дополнительно важно отметить, что привод бывает исключительно электрическим и во 2-ом случае гидравлическим, других нет и быть не может. Каждый из указанных приводов имеет свои плюсы и минусы, которые очевидны каждому водителю индивидуально. Электрический мотор так сказать выполняет всю задачу в специальном электрическом приводе, а уже в гидравлическом, поставленную основную задачу выполняют гидравлические специальные цилиндры, выполняющие свою работу по поступающему к ним сигналу встроенных в систему электромагнитных клапанов.
В системе электрический привод имеет следующий плюс: он мало потребляет энергии, в то время как плюс гидравлического привода в системе – это высокая скорость при переключении скоростей.
Важно выяснить и какие недостатки встречаются у каждой из систем? Электрическая – слишком низкая скорость переключения, далее гидравлическая — это весьма высокая потребность в энергии, следовательно такие роботизированные коробки часто ставят на дорогостоящие автомобили, с блоком электрическим оснащают авто бюджетной категории.
Когда получает соответствующий сигнал системный электронный блок от датчиков, то создается некий стиль переключения скоростей, и отправляет сразу же его системам, так сказать подчиняющимся ему, а они начинают работать по этой самой системе. Следует добавить, что электронный блок всегда и совместно работает с силовым агрегатом и системой ABS. Продолжим выяснять, что значит РКПП и какими качествами обладает.
Все о недостатках и качествах роботизированной коробки передач
Мы почти выяснили, что означает РКПП, осталось узнать больше о ней, предлагаем ознакомиться с плюсами рассматриваемой нами сейчас коробки:
- Роботизированная коробка передач, внимание! В отличие от любой другой КПП потребляет меньше всего масла.
 Экономичный расход масла и топлива в целом.
Экономичный расход масла и топлива в целом. - Коробка в о
 Экономичный расход масла и топлива в целом.
Экономичный расход масла и топлива в целом.Роботизированная коробка передач Durashift (Дюрашифт) от Ford
При проектировании роботизированной трансмиссии инженеры американской компании Ford решили полностью избавиться от сложных гидравлических механизмов. Первый Durashift построен на базе обычной механики iB5 от Фокуса в 2000 году. Её дополнили электронным блоком со сцеплением электрогидравлического типа, исполнительными устройствами. Такая конструкция благотворно сказалась на скорости переключения. Оно занимает не 600 миллисекунд, как для механики, и не 800 миллисекунд, как для АКПП, а всего 200 миллисекунд.
Вес Durashift EST такой же, как у классического автомата. Но типичные потери в гидротрансформаторе отсутствуют, поэтому расход автомобилей с роботизированной трансмиссией ощутимо меньше, чем в случае с АКПП. Но конструкторам не удалось избежать типичного недостатка «робота» – разрыва мощности. Это негативно влияет на плавность переключений.
В качестве исполнительных устройств использовано два электромотора, которые скомпонованы на единой пластине. Чтобы обеспечить корректное переключение, положение моторов отслеживается датчиками Холла. Сам рычаг переключения механически не связан с коробкой. Его перемещение считывают датчики, данные с которых снимает, а затем передает в блок управления электроника. В конструкцию встроена информационная шина CAN. Вместо традиционного для механики сцепления использовано оригинальное соединение диска и выжимного подшипника.
Сцепление Durashift является саморегулируемым. Это дает два неоспоримых преимущества:
- Для выключения не требуется высокое усилие, что делает эксплуатацию автомобиля комфортней.
- Увеличенный ресурс за счет автоматической регулировки.
Примечание: Durashift EST устанавливается на модели Фиеста, Фьюжн, Мазда 2 с мотором на 1,4 л. «Робот» защищен от аварийных ситуаций. Например, запускать мотор можно только в режиме N, педаль тормоза должна быть нажатой. ЭБУ препятствует ручному переключению, когда частота вращения мотора и скорость движения не соответствуют включаемой передаче.
Адаптация роботизированных коробок Durashift
При сбоях в электронике, после технического обслуживания, замены узла сцепления приходится заново обучать робот – адаптировать трансмиссию. Для этого необходим правильный подбор крутящего момента, корректное переключение и выжим сцепления, плавное начало движения. Чтобы провести адаптацию, применяют дилерские сканеры. Процедура состоит из трех этапов:
- Прокачка гидросистемы с настройкой TCM. Старую тормозную жидкость меняют или же просто пополняют её уровень.
- Настройка сервомоторов для наладки переключений.
- Организация взаимосвязи между сцеплением, сервомоторами и модулем ТСМ.
Учтите, что при эксплуатации в российских условиях для РКПП применяют полусинтетическое масло 75W-90. Но никакое обслуживание не защитит от поломок при нарушении нормального режима эксплуатации. В случае поломки авто с Durashift EST лучше не буксировать до сервиса, а воспользоваться услугами эвакуатора. При помещении на эстакаду эвакуатора включайте нейтральную передачу.
В случае поломки авто с Durashift EST лучше не буксировать до сервиса, а воспользоваться услугами эвакуатора. При помещении на эстакаду эвакуатора включайте нейтральную передачу.
Типичные проблемы Durashift EST
1) Не переключаются передачи из-за повреждения проводки
- Жгут с проводами не защищен от негативного воздействия окружающей среды. Коммутация страдает от влаги и грязи, в особенности это касается участка, расположенного между электромоторами и контроллером коробки переключения, который находится максимально близко по отношению к земле.
2) Поломка сцепления
- Ресурс сцепления колеблется в пределах 120–180 тыс. км. Его выработка связана не только с качеством обслуживания, но и с манерой езды. Если при длительных остановках ручка КПП переводится в нейтральное положение, это способствует меньшему перегреву, длительной службе исполнителя и самого сцепления.
3) Ошибки датчиков
- Большинство ошибок связаны с неправильным положением сцепления или механизма переключения.

4) Неправильно функционируют моторы в сервоприводах
- Для управления моторами в сервоприводах используются сложные импульсы. Сами двигатели комплектуются щеточными узлами с датчиками Холла. При их загрязнении нарушается работа механизма.
RVS-Master для безразборного ремонта Durashift EST
Запуск при минусовых температурах неминуемо ведет к ускоренному износу. То же самое происходит в момент перегрева, когда автомобиль простаивает в пробке. Большинство машин с Durashift EST: Фиеста, Фьюжн, Мазда 2 – эксплуатируются в мегаполисах. Поэтому коробка испытывает повышенную нагрузку. Для защиты применяют состав RVS-Master, который также восстанавливает шестерни, валы, подшипники в трансмиссии.
После обработки формируется прочный слой металлокерамики. Физические характеристики рабочих поверхностей меняются, сокращается трение. Поэтому со временем пропадает гул, посторонние шумы и вибрации. Новообразованный слой устойчив к коррозии, восстанавливает номинальные размеры деталей, по своей структуре не чужероден черным сплавам. В отличие от классических присадок, кондиционеров, промывок, RVS-Master не влияет на свойства масла. Полусинтетика в РКПП сохраняет базовую текучесть и эффективность теплоотвода, не образовывает пену, осадок.
Нормализация работы РКПП способствует падению расхода топлива. Своевременное обслуживание и профилактическая обработка геомодификатором трения позволяют наслаждаться всеми преимуществами Durashift EST на Фиеста, Фьюжн, Мазда 2. К достоинствам такой РКПП относят:
- Возможность полного контроля езды за счет торможения мотором и активного ручного переключения.
- «Короткую» первую передачу, которая подходит для быстрого старта со светофоров.
- Автоматическую адаптацию к текущим дорожным условиям – холмам, извилистым дорогам. Это реализовано благодаря режиму распознавания подъемов и спусков, который гарантирует переключение передач в оптимальной последовательности.
- Пригодность для динамичной езды.
её отличие от автоматической, плюсы и минусы
Тяговые характеристики двигателей внутреннего сгорания и их приспособляемость к нагрузке недостаточны для прямого привода. Для адаптации используются разнообразные типы коробок перемены передач, которые позволяют изменить частоту вращения в достаточно широком диапазоне.
Для адаптации используются разнообразные типы коробок перемены передач, которые позволяют изменить частоту вращения в достаточно широком диапазоне.
Помимо этого, такой механизм обеспечивает возможность движения задним ходом, длительной остановки автомобиля с работающим силовым агрегатом.
Коробка передач робот оснащается автоматом для управления работой устройства в заданном режиме с учетом нагрузки и других условий движения. Процессом руководит электронный блок, запрограммированный определенным образом.
Водитель осуществляет выбор алгоритма и задает его при помощи селектора, кроме того, он может перенимать управление работой механизма и производить переключения как на обычной механике.
Использование роботизированных коробок обеспечивает водителю максимально комфортные условия. Нет необходимости отвлекаться и терять время на переключения передач, а заложенные в процессор программы обеспечивают (в зависимости от условий движения) максимальную экономию топлива.
Большинство ведущих автопроизводителей, и АвтоВАЗ в их числе, широко используют коробки передач такого типа на транспортных средствах разных классов.
Что такое коробка передач робот
В настоящее время существует множество разнообразных конструкций механизмов автомобильных трансмиссий. Для ответа на вопрос: коробка передач робот — что это такое?, следует разобраться в ее устройстве, изучить принцип работы и проанализировать достоинства и недостатки. Практически любой сложный механизм имеет свои плюсы и минусы, устранение которых невозможно без коренной переделки системы.
По своей сути роботизированная коробка является логическим развитием традиционной механической. В ней функции управления переключением передач автоматизированы и контролируются электронным блоком. Помимо этого процессор дает команду на исполнительный механизм сцепления для разобщения двигателя и трансмиссии при перемене передаточного числа.
Роботизированная коробка работает в комплексе с иными элементами трансмиссии. Автоматизированное управление согласуется с работой сцепления, предназначенного для обеспечения переключений.
Автоматизированное управление согласуется с работой сцепления, предназначенного для обеспечения переключений.
Устройство и принцип работы
За все время развития автомобилестроения предпринимались множественные попытки упростить управление трансмиссией. Первые удачные конструкции роботизированных коробок передач, пошедшие в серию, появились только после оснащения машин процессорами. Все попытки автоматизировать управление при помощи электромеханических и гидравлических устройств не дали положительных результатов.
Они оказались слишком ненадежными и не обеспечивали приемлемой скорости переключения. Еще одним недостатком такого рода коробок была излишне высокая сложность и, как следствие, запредельная стоимость.
Решить все технические проблемы стало возможным только с появлением компактных и недорогих процессоров и датчиков, контролирующих режимы работы двигателя и трансмиссии.
Конструкция
Многие производители автомобилей самостоятельно занимались разработкой данного класса механизмов. Это обеспечило достаточно большое разнообразие конструкций коробок передач роботов, тем не менее, можно выделить в них общие элементы:
Это обеспечило достаточно большое разнообразие конструкций коробок передач роботов, тем не менее, можно выделить в них общие элементы:
- электронный блок управления;
- механическая коробка передач;
- сцепление фрикционного типа;
- система управления переключением передач и муфтой.
Нередко функции электронного блока выполняет бортовой компьютер, контролирующий работу системы питания и зажигания в силовом агрегате. Процессор устанавливается вне картера коробки и соединяется с нею кабельными системами. Особое внимание при этом уделяется защите соединений, используются специально разработанные уплотнители. Нередко контактные группы покрываются тонким слоем золота для предотвращения окисления.
За основу роботизированных коробок обычно берутся хорошо себя зарекомендовавшие устройства. Так, компания Mercedes-Benz при изготовлении агрегата Speedshift использовала АКП 7G-Tronic, вместо гидротрансформатора использовали многодисковое сухое сцепления фрикционного типа.
По аналогичному пути пошли и баварские автомобилестроители из BMW, оснастив шестиступенчатую механическую коробку автоматизированной системой управления.
Обязательным элементом, обеспечивающим работу коробки, является механизм сцепления. В случае с роботизированным устройством применяется конструкция фрикционного типа с одним или несколькими дисками. В последние годы появились трансмиссии с двойным механизмом сцепления, работающими параллельно. Такая конструкция обеспечивает передачу крутящего момента от двигателя без прерывания.
| Тип трансмиссии | С одним сцеплением | С двумя сцеплениями |
| Audi R-Tronic | + | |
| Audi S-Tronic | + | |
| Alfa Romeo Selespeed | + | |
| BMW SMG | + | |
| Citroen SensoDrive | + | |
| Ford Durashift | + | |
| Ford Powershift | + | |
| Lamborghini ISR | + | |
| Mitsubishi Allshift | + | |
| Opel Easytronic | + | |
| Peugeot 2-Tronic | + | |
| Porsche PDK | + | |
| Renault Quickshift | + | |
| Toyota MultiMode | + | |
| Volkswagen DSG | + |
Системы управления работой сцепления и переключением передач бывают двух видов: с электрическим или гидравлическим приводом. Каждый из вариантов имеет свои положительные и отрицательные стороны. Возможны комбинации из названных выше способов управления коробкой, позволяющие максимально использовать достоинства обеих конструкций и свести к минимуму их недостатки.
Каждый из вариантов имеет свои положительные и отрицательные стороны. Возможны комбинации из названных выше способов управления коробкой, позволяющие максимально использовать достоинства обеих конструкций и свести к минимуму их недостатки.
Электрический привод сцепления использует сервомоторы, которые обеспечивают минимальное энергопотребление. Отрицательным моментом является крайне низкое время переключения передач (в пределах от 300 мс до 500 мс), что приводит к рывкам и повышенным нагрузкам на детали трансмиссии.
Гидравлические приводы работают значительно быстрее, это делает возможным оснащение такими коробками даже спортивных автомобилей. На суперкаре Ferrari 599GTO время переключения составляет всего – 60 мс, а у Lamboghini Aventador и того меньше – 50 мс. Такие показатели обеспечивают данным машинам высокие динамические характеристики при сохранении плавности движения.
Принцип действия
Для того, чтобы понять как работает роботизированная коробка передач, следует получить представление об алгоритме работы ее механизмов.
Водитель запускает двигатель, выжимает педаль тормоза и переводит селектор в определенное положение. Привод сцепления разрывает поток мощности, а исполнительный механизм коробки производит подключение выбранной передачи.
Водитель отпускает тормоз и плавно увеличивает обороты, автомобиль начинает движение. В дальнейшем все переключения производятся в автоматическом режиме, при этом учитываются заданный режим и данные от датчиков. Управление механизмом осуществляется процессором в соответствии с выбранным алгоритмом. При этом у водителя имеется возможность вмешиваться в работу коробки.
Видео — роботизированная КПП (робот):
Полуавтоматический режим роботизированной трансмиссии аналогичен функции ручного управления автоматической коробки — Tiptronic. В таком случае водитель при помощи рычага селектора или переключателей установленных на рулевой колонке производит переключения передач с понижением или повышением. Отсюда исходит и другое название роботизированной коробки – секвентальная.
Отсюда исходит и другое название роботизированной коробки – секвентальная.
Трансмиссия такого типа получает все большее распространение на автомобилях. При этом наблюдается следующее разделение: коробками с электрическими сервомоторами комплектуются бюджетные модели. Ведущие автопроизводителя разрабатывают и выпускают серийно следующие типы механизмов:
- Citroen – SensoDrive;
- Fiat — Dualogic;
- Ford — Durashift EST;
- Mitsubishi — Allshift;
- Opel — Easytronic;
- Peugeot – Tronic;
- Toyota – MultiMode.
Для более дорогих моделей производятся коробки с гидравлическим приводом:
- Alfa Romeo — Selespeed;
- Audi — R-Tronic;
- BMW — SMG;
- Quickshift от Renault.
Самая продвинутая по показателям роботизированная коробка ISR (Independent Shifting Rods) устанавливается на суперкары от компании Lamborghini.
Отличие роботизированной коробки передач от автоматической
Развитие и невысокая стоимость электронных блоков управления сделали возможным их применение на серийных моделях машин. Они имеют разные виды трансмиссии и возникает закономерный вопрос — в чем разница между коробкой передач роботом и автоматом? Если таковые отличия существуют, то какой вид из них будет лучше отвечать требованиям водителя и на какие характеристики следует обратить внимание при выборе автомобиля.
Они имеют разные виды трансмиссии и возникает закономерный вопрос — в чем разница между коробкой передач роботом и автоматом? Если таковые отличия существуют, то какой вид из них будет лучше отвечать требованиям водителя и на какие характеристики следует обратить внимание при выборе автомобиля.
Разница между роботизированной коробкой и автоматом состоит в конструкции сцепления. Вместо гидротрансформатора в ней используется одно- или многодисковое сухое сцепление фрикционного типа.
В редукторе, как в механике, ведущие и ведомые шестерни находятся в постоянном зацеплении и задействуются они при помощи специальных муфт. Для уравнения угловых скоростей используются синхронизаторы.
Видео — тест драйв Лада Приора с роботом АМТ:
В автоматических коробках преимущественно используются редукторы планетарного типа и сложная система управления их функционированием. В первом и втором варианте выбор передаточного отношения определяется автоматикой. Это освобождает водителя от необходимости отслеживать режимы работы двигателя и производить переключения.
В первом и втором варианте выбор передаточного отношения определяется автоматикой. Это освобождает водителя от необходимости отслеживать режимы работы двигателя и производить переключения.
В сравнении автоматической коробки с роботом, лидером по такому показателю, как экономичность, является второе устройство. В сухом сцеплении механические потери значительно ниже, нежели у гидротрансформатора.
С другой стороны, автомат лучше обеспечивает плавность движения и езда в таком автомобиле более комфортная. Еще одним недостатком такого типа трансмиссии является дороговизна ремонта, который может выполняться только высококвалифицированными специалистами в условиях техцентра.
При выборе между роботизированной коробкой и автоматом следует принимать все вышеперечисленные факторы. Для недорогих бюджетных моделей существенными являются стоимость автомобиля и издержки на его содержание. При покупке элитных автомобилей такие вопросы обычно не имеют особого значения. Для водителя разницы в управлении автоматом или роботом практически нет.
Роботизированная коробка передач плюсы и минусы
К перечню положительных сторон коробки передач с роботизированным управлением можно отнести следующее:
- Высокая надежность механизма редуктора, проверенного длительной эксплуатацией.
- Применение сухого сцепления фрикционного типа способствует снижению потерь и уменьшению расхода топлива.
- Небольшое количество эксплуатационной жидкости – трансмиссионного масла порядка 3-4 литров, против – 6-8 литров у вариатора.
- Высокая ремонтопригодность роботизированной коробки (фактически в качестве ее основы используется хорошо известная механика).
- Автоматика повышает ресурс сцепления до 45 – 55 % по сравнению с традиционным управлением педалью.
- Наличие полуавтоматического режима, позволяющего водителю вмешиваться в работу агрегата при движении в сложных дорожных условиях на подъеме или в пробке.
Достоинства КПП «робот» очевидны, что способствует повышению популярности данного типа трансмиссии на автомобилях разного класса. Усилиями инженеров и конструкторов агрегат постоянно совершенствуется, его характеристики улучшаются.
Видео — как работает роботизированная коробка передач на Лада Приора:
Тем не менее, у роботизированной коробки передач имеются и некоторые минусы:
- Невозможность перепрошивки процессора и задания иного алгоритма управления с целью повышения динамических характеристик автомобиля.
- Невысокая скорость перемены передач у коробок с электрическими сервоприводами, которые невозможно исправить без переделки всей конструкции.
- Возможность пробуксовки сцепления и перегрева механизма при движении на низкой скорости в горку или в городской пробке. Опытные водители рекомендуют в таком случае использовать режим Tiptronic.
- Частые рывки при автоматическом переключении передач, сброс газа перед данной операцией или равномерный режим движения, позволит снять остроту проблемы.
У робота есть целый ряд преимуществ перед иными видами трансмиссий и некоторые недостатки. Такой тип механизма рекомендуется водителям со спокойной манерой управления автомобилем.
Для любителей прокатиться с ветерком такая коробка будет слишком задумчивой. Все имеющиеся минусы механизма своими силами устранить невозможно, поэтому к его особенностям следует просто приспособиться.
В целом коробка передач робот заслужила положительные отзывы автовладельцев. Особенно отмечаются большой ресурс работы, высокая надежность и её неприхотливость.
По некоторым отзывам покупателей Датсун Он-До можно отметить, что они с удовольствием бы купили этот автомобиль, укомплектованный роботом.
Как подобрать масло для автомобиля можете прочитать в статье.
Жидкая резина (https://voditeliauto.ru/stati/tyuning/zhidkaya-rezina-dlya-avto.html) для покраски автомобиля
Видео — нюансы работы роботизированной коробки передач:
Может заинтересовать:
Сравнить стоимость ОСАГО для своего авто
Добавить свою рекламу
Сканер для самостоятельной диагностики автомобиля
Добавить свою рекламу
Выбрать видеорегистратор: незаменимый гаджет для водителя
Добавить свою рекламу
Некоторые водители предпочитают видеорегистратор в виде зеркала
Добавить свою рекламу
Роботизированная дозаправка. Миссия 3 | Служба исследований и полетов НАСА
Космический корабль использует расходные материалы, такие как топливо и охлаждающая жидкость, для выполнения ключевых функций, таких как маневрирование и обслуживание критически важного оборудования. Расходные материалы по своей природе со временем заканчиваются. Технологии пополнения этих важнейших запасов в космосе в настоящее время не существует. Миссия НАСА по роботизированной дозаправке 3 (RRM3) поможет изменить эту парадигму, расширив возможности обслуживания спутников и сделав возможным длительные исследования дальнего космоса.
Модуль переноса жидкости RRM3 и подставка для инструмента (вверху) перед запуском
RRM3 основан на первых двух этапах демонстрации технологий Международной космической станции, на которых тестировались инструменты, технологии и методы дозаправки и ремонта спутников на орбите. RRM3 расширит эти демонстрации, включив в них технологии, необходимые для хранения и транспортировки сверххолодных криогенных жидкостей.
Миссия была запущена на космическую станцию в декабре 2018 года. Предполагаемый срок ее службы на станции составляет два года, хотя НАСА намеревается выполнить задачи RRM3 в течение первого года.8 апреля RRM3 столкнулся с проблемой, которая потребовала сброса криогенной жидкости, содержащейся в модуле, но миссия по-прежнему предполагает выполнение операций с инструментами, связанных с транспортировкой криогенного топлива в космосе, демонстрируя передовые технологии, необходимые для этого. возможно.
RRM3 разработан и эксплуатируется Отделом проектов по обслуживанию спутников в Центре космических полетов имени Годдарда НАСА в Гринбелте, штат Мэриленд, под руководством Управления космических технологий НАСА.
Что такое криогенные жидкости?
Криогенная жидкость — важный расходный материал для космических полетов.
В качестве топлива криогенные жидкости, такие как жидкий метан и жидкий водород, полезны для исследовательских миссий, потому что они создают достаточную тягу или то, что по сути является ускорением, для запуска ракеты с Земли или другой планеты. Без достаточно мощного ракетного топлива гравитационное притяжение планетарного тела помешало бы ракете успешно покинуть орбиту тела.
Жидкий кислород, еще одна криогенная жидкость, также используется для поддержания систем жизнеобеспечения космонавтов, поскольку это более эффективный способ транспортировки и хранения кислорода, чем в его газообразной форме.
В качестве охлаждающей жидкости он поддерживает работу космических кораблей, а возможность пополнения ее запасов может продлить срок их службы на годы.
RRM3 тестирует инструменты и технологии, необходимые для хранения, перекачки и пополнения криогенной жидкости, поэтому технология «готова к использованию», когда это необходимо.
Обеспечение возможности исследования человеком всей Солнечной системы
Возможность пополнения запаса топлива и охлаждающей жидкости позволяет путешествовать дольше, чем позволяет один баллон с топливом. Возможности, которые НАСА будет развивать с помощью RRM3, могут быть применены в будущих исследовательских миссиях человека.
RRM3 Основные цели
1. Продемонстрировать методы, необходимые для выполнения криогенного переноса жидкого метана в условиях микрогравитации
2. Поддержание массы криогенной жидкости в течение длительного времени (<3 месяцев) за счет нулевого испарения
Что внутри и на модуле?
- Система перекачки жидкости (включая резервуары и линии)
- Криогенная жидкость (жидкий метан)
- Интерфейс криогена (кооперативный и некооперативный)
- Компактный тепловизор (CTI)
- Инновационные системы технического зрения
- Криокулеры
- Инструменты и адаптеры
Компактный тепловизор
Компактный тепловизор (CTI) — это усовершенствованная, очень компактная тепловизионная камера, которая была установлена в углу полезной нагрузки RRM3 и с этого места будет снимать и записывать на видео поверхность Земли под ней.Автостопщик RRM3 будет снимать и измерять пожары, ледяные щиты, ледники и температуру поверхности снега. CTI также будет измерять перенос воды из почвы и растений в атмосферу — важные измерения для понимания роста растений. Многие условия, изучаемые земными учеными, в том числе и эти, легко обнаруживаются в инфракрасном или тепловом диапазонах длин волн.
Технология CTI представляет собой относительно новую технологию фотодетекторов, известную как сверхрешетка с напряженным слоем или SLS.Помимо того, что он очень маленький, его длина составляет почти 16 дюймов, а высота — шесть дюймов, SLS потребляет мало энергии, работает при температурах жидкого азота, легко изготавливается в высокотехнологичной среде и является недорогим. Цель демонстрации — поднять уровень технологической готовности SLS до девяти (или TRL-9), что означает, что он летал в космос и продемонстрировал, что он хорошо работает в экстремальных условиях окружающей среды в космосе.
RRM3 Дополнительные цели
1.Демонстрация и проверка компактного тепловизора — прибора, который использует доступное пространство на RRM3 для наблюдения за Землей, обнаружения дыма и пожаров, а также для измерения испарения сельскохозяйственных культур.
2. Полные задачи машинного зрения — оценка реперных знаков (декалей) в космосе с использованием уникальных шаблонов, которые улучшают алгоритмы машинного зрения и помогают в автономном рандеву и позиционировании инструмента.
Инженеры Центра космических полетов имени Годдарда НАСА в Гринбелте, штат Мэриленд, проводят проверку соответствия трех внешних инструментов RRM3.После того, как RRM3 будет установлен за пределами Международной космической станции, роботизированная рука Dextre установит пьедестал и инструменты, предварительно собранные астронавтами на космической станции.
Описание инструментов
Набор из трех основных инструментов, предназначенных для использования на космической станции Dextre, будет использоваться для выполнения задач миссии. Эти инструменты второго поколения были разработаны на основе операционных уроков, извлеченных из фаз 1 и 2 RRM, а также уникальных требований миссии RRM3.Три инструмента:
Робот-беспозвоночный для визуального осмотра 2 (VIPIR2)
Роботизированная инспекционная камера, используемая для визуальной проверки входа и размещения шланга передачи криогена (гибкой линии) (CTH) в приемный резервуар.
Инструмент для криогенного обслуживания (CST)
Роботизированный инструмент с регулируемыми роликами, используемый для захвата гибкого шланга для перекачки криогенного вещества и установки его в топливный порт.
Многофункциональный инструмент 2 (MFT2)
Инструмент с двойным поворотным приводом, используемый для подсоединения нестандартных шланговых адаптеров к удобным для роботов заправочным портам.
Во время наземных испытаний астронавты Энн Макклейн и Дэвид Сен-Жак позируют с соответствующими приборами RRM3 на борту Международной космической станции.
Демонстрация хранения и пополнения криогена
Инструмент для обслуживания криогенов перед запуском
RRM3 продемонстрирует работу инструментов, необходимых для роботизированной транспортировки криогенной жидкости, которая имеет решающее значение для силовых установок и систем жизнеобеспечения в космосе. На предыдущем этапе роботизированной заправки топливом (RRM2) было продемонстрировано множество подготовительных задач, ведущих к пополнению криогенного вещества, таких как снятие крышек / клапанов и установка адаптеров линии охлаждающей жидкости.Роботизированные операции RRM3 будут сосредоточены на заключительном этапе соединения, герметизации и управления шлангами, необходимыми для обеспечения криогенной передачи топлива на орбиту. С момента запуска в декабре 2018 года RRM3 продемонстрировал первое в истории долгосрочное хранение криогенной жидкости с нулевым кипением, успешно сохранив криогенную жидкость в течение четырех месяцев на станции до апрельской операции вентиляции.
Внутри модуля RRM3 находится резервуар-источник, представляющий источник питания на обслуживающем космическом корабле, и резервуар-приемник, представляющий космический корабль с обедненным криогенным резервуаром.
Во время операций миссии RRM3 роботизированная рука космической станции Dextre будет выполнять задачи, связанные с резервуаром-приемником, используя набор из трех основных инструментов, без использования криогенной жидкости. Последовательность задач начинается с многофункционального инструмента 2, который управляет меньшими специализированными инструментами для подготовки к плавному переносу жидкого метана из резервуара-источника в перенос жидкости. Затем инструмент для обслуживания криогенного вещества использует шланг для соединения резервуара источника с резервуаром приемника. Для наблюдения за процессом в роботе-беспозвоночном для визуального осмотра 2 (VIPIR2) используется современная роботизированная камера, чтобы убедиться, что инструменты правильно расположены.
Хранение криогенов в космосе может быть трудным, потому что их чрезвычайно низкие температуры кипения заставляют их со временем выкипать, если температура не может поддерживаться. Обычные резервуары для хранения криогенного вещества на земле используют пассивные системы охлаждения и намеренно выпускают их содержимое в атмосферу, чтобы ограничить давление в резервуаре во время разогрева. Это значительно сокращает срок службы хранимого криогена.
Важнейшей частью RRM3 является демонстрация хранилища с нулевым выкипанием из 42 литров жидкого метана за счет использования активного охлаждения.Используя криокулеры и усовершенствованную многослойную изоляцию для уравновешивания температур, RRM3 успешно хранил жидкий метан в течение четырех месяцев без выкипания, демонстрируя систему, которая значительно снизит потери жидкости и устранит необходимость в резервуарах увеличенного размера и дополнительном топливе.
Ресурсы
SVS: качественный носитель RRM
RRM3 в новостях
Frontiers | Мультимодальный человеко-машинный интерфейс на основе ЭЭГ / ЭМГ / ЭОГ для управления в реальном времени мягкой рукой робота
Введение
Инсульт считается третьей по частоте причиной инвалидности во всем мире и серьезно влияет на качество жизни выживших с точки зрения их повседневного функционирования (Lim et al., 2012). До 80% выживших после инсульта остаются с остаточным дефицитом двигательной функции руки и кисти (Hung et al., 2016). Было обнаружено, что реабилитация наиболее эффективна, если ее начать в первые 6 месяцев после инсульта, когда механизмы пластичности мозга более активны и способствуют повторному обучению и восстановлению функции рук (Robertson and Murre, 1999). Хотя программа реабилитации, включающая повторяющиеся движения повседневной жизни, может позволить выжившим после инсульта частично восстановить утраченную двигательную функцию, многим пациентам трудно двигать пораженными верхними конечностями в соответствии с требованиями таких программ физической подготовки (Ang and Guan, 2013).Многие клинические исследования показали, что активные, повторяющиеся и интенсивные реабилитационные тренировки могут иметь значительные преимущества для восстановления нарушенных двигательных функций (Fisher and Sullivan, 2001; Schaechter, 2004). При традиционном терапевтическом подходе физиотерапевты учат переживших инсульт, как управлять своими движениями с целью восстановления основных физических навыков. Однако этот подход очень трудоемок, неэффективен и требует значительных физических усилий со стороны пациентов, которые иногда могут отказываться активно сотрудничать с режимом.Кроме того, пациентам может потребоваться госпитализация для реабилитации. Другая проблема заключается в том, что многие физиотерапевты, возможно, не прошли необходимую подготовку для проведения таких программ реабилитации после инсульта (Curtis and Martin, 1993). Кроме того, процесс реабилитационного обучения неадекватен тем, что не имеет отношения к интерфейсам мозг-компьютер (ИМК). Вышеперечисленные факторы серьезно ограничили клиническую эффективность реабилитационных тренировок.
Недавно была предложена физиотерапия с использованием роботов для улучшения неврологической реабилитации в традиционной постинсультной терапии.В частности, роботизированные устройства могут быть не только рассчитаны по времени для обеспечения реабилитационного обучения в течение длительных периодов времени, обеспечивая необходимую силу для пациентов последовательным, точным образом, без усталости, но они также могут быть запрограммированы на переключение между различными терапевтическими режимами в зависимости от состояния реабилитация пациента. Они также могут отслеживать и записывать показатели пациентов во время реабилитационных тренировок (Takahashi et al., 2008). Многие клинические исследования показали, что роботизированная помощь может значительно повысить эффективность физиотерапии, включая интенсивные повторяющиеся движения рук, направленные на улучшение функции конечностей (Fasoli et al., 2003). Человеческая рука представляет собой тонкую и сложную структуру, состоящую в общей сложности из 27 отдельных костей, а ее суставы позволяют выполнять широкий диапазон точных движений с примерно 21 степенью свободы (DOF) и подвержены сложному распределению сил. Хотя обычные жесткие роботы способны обеспечивать прямолинейное и вращательное движение конечностей пациентов, перенесших инсульт, с высокими усилиями и крутящими моментами, они все же имеют некоторые недостатки. Обычно они тяжелые, шумные и дорогие; они страдают от ограниченной приспособляемости; они потенциально опасны; и они требуют ухода и времени для правильного выравнивания с человеческими суставами (Polygerinos et al., 2015). Роботы с мягкими руками имеют ряд преимуществ перед обычными роботизированными устройствами. Они имеют постоянно деформируемую структуру, которая плотно прилегает к пальцам, что позволяет точно выполнять упражнения. Они также позволяют изгибать пластик с высокой степенью кривизны и высоким уровнем безопасности, и между конечностью и роботом существует положительное взаимодействие. В результате можно эффективно избежать болезненных мышечных судорог или спазмов, а также вторичных травм, которые могут возникнуть при использовании роботизированных систем (Rus and Tolley, 2015).С помощью роботов с мягкими руками пациенты, перенесшие инсульт, могут активно участвовать в реабилитационных упражнениях, которые включают сгибающие движения пальцев для удовлетворения основных требований повседневной жизни, таких как питье и еда. Тем не менее, подходящая стратегия управления, чтобы мягкий робот соответствовал предполагаемому движению объекта, все еще остается открытой проблемой.
BCI могут предоставить вспомогательную технологию, которая преобразует активность мозга в команды, сообщаемые с намерением пользователя управлять роботизированной системой, которые способствуют нейронной пластичности, необходимой для восстановления функции после инсульта (Wolpaw et al., 2002).
Метод, сочетающий гибридный ИМК и роботизированную терапию, более эффективен для восстановления после инсульта и помогает активировать пластичность мозга, чем традиционная реабилитационная терапия (Dipietro et al., 2005; Ang et al., 2015). Кроме того, команды управления могут быть основаны на характеристиках, извлеченных из биологических сигналов, таких как электроэнцефалография (ЭЭГ), электроокулография (ЭОГ) и электромиография (ЭМГ). Например, с помощью передовых методов обнаружения, обработки и классификации сигналов ЭМГ от движений мышц оказалось возможным управлять протезом руки с быстрой реакцией и высокой точностью (Gray et al., 2012). Однако инсульт может привести к мышечной слабости до такой степени, что мышцы не могут производить адекватные силы для эффективной классификации результирующих сигналов ЭМГ, что ограничивает клиническое применение этого подхода (Lum et al., 2012). Альтернативный подход состоит в том, чтобы контролировать активность ЭЭГ, поскольку пациент представляет предполагаемое движение, тем самым используя нейронную информацию в качестве входного контроля для роботизированного протеза. К сожалению, сигналы ЭЭГ не имеют достаточного пространственного разрешения, чтобы их можно было использовать для управления движениями отдельных пальцев.Кроме того, сигналы ЭЭГ ослабляются во время передачи, что затрудняет постклассификационную обработку этих сигналов для управления точными движениями (Xiao and Ding, 2013). Сигналы ЭОГ имеют хорошую стабильность и больший потенциал, чем ЭЭГ. ЭОГ можно применить к ИМК по довольно низкой цене и обеспечивает хорошую точность, так что это еще один потенциально полезный метод управления роботизированными протезами. Однако применение этого подхода в течение длительных периодов ограничено
Что означает передача коронавируса в сообществе?
Возможно, вы слышали термин «передача от сообщества», который используется в новостях о коронавирусе и сообщениях властей.
Используется для описания ситуации, когда человек заражен вирусом, но в последнее время не был за границей или не контактировал с другими подтвержденными случаями.
Этот термин в основном означает, что власти не могут отследить источник инфекции.
«Это означает, что могут циркулировать инфицированные члены сообщества, которые не были помечены как инфицированные, и именно здесь это становится действительно очень проблематичным», — сказала вирусолог Кирсти Шорт из Университета Квинсленда о передаче инфекции в сообществе.
ЖИВЫЕ ОБНОВЛЕНИЯ: читайте в нашем блоге последние новости о пандемии COVID-19.«Вот тогда это означает, что мы пропустили случаи заражения вирусом и имели место случаи передачи вируса, которые мы не контролировали».
Ответы на вопросы о коронавирусе
Это подкаст ABC Coronacast, посвященный последним новостям и исследованиям, чтобы понять, как мир переживает эпидемию.
ПодробнееМинистерство здравоохранения сообщает, что в Австралии нет широко распространенной передачи COVID-19 среди населения.
В нем говорится, что «большинство подтвержденных случаев заболевания в Австралии заразились за границей, в том числе на борту круизных судов или в связи с недавними поездками в Европу или Америку».
На приведенном ниже графике показана скорость передачи коронавируса на месте в Австралии, где контакт не был идентифицирован, что указывает на возможную передачу от сообщества, по сравнению с передачей за границу, передачей местного происхождения при контакте с подтвержденным случаем и подтвержденными случаями, когда передача все еще расследуется.