
Зачем современным машинам задние подруливающие колеса

Когда японские машины считались самыми-самыми продвинутыми, легенды доносили о том, что в Стране восходящего солнца есть машины, у которых поворачиваются все четыре колеса. Потом в суете обновок те времена как-то забылись. Бурное начало девяностых годов прошло, и в серийном производстве остались только самые нужные из технических решений той поры. Но сейчас интерес к полноуправляемым шасси снова растет, правда, уже на ином техническом уровне, без дополнительных рулевых валов и с заметно упростившейся задней подвеской.
И ладно бы только на Porsche 911 GT3 или Lamborghini Aventador — но ведь на обычном Renault Espace тоже внедряют поворачивающиеся задние колеса. В чем смысл такого технического решения, и ради чего шли на такие сложности производители? И почему о технологии забыли до недавнего времени?
Зачем нужна управляемость
Настройка управляемости всегда считалась очень сложной работой, а машины с идеальным балансом попадали в число лучших. Шасси современных машин, на первый взгляд, мало изменилось в сравнении с восьмидесятыми годами, но отличие есть. И оно отлично себя проявляет, если взглянуть на достигаемые машинами скорости на маневре «переставка» или на гоночной трассе.

Современный семейный хэтчбек способен опередить большую часть суперкаров тридцатилетней давности на автодроме, и не в последнюю очередь за счет тонкой настройки управляемости и отличной «цепкости» шасси. Конечно, и резина, и эластичность моторов тоже играют свою роль, но сейчас в первую очередь поговорим о геометрии.
Нет, речь вовсе не о школьном предмете — я про геометрию шасси. Это набор параметров, описывающих изменения в положении элементов шасси при изменении нагрузки. Суть фокуса в том, что при прохождении поворотов машина наклоняется, да и дорога имеет свой профиль. При правильном расчете параметров геометрии шасси покрышки всегда имеют оптимальный для данных условий контакт с дорогой.
Речь здесь не о максимальной прижимной силе, а о соотношении коэффициента сцепления колес передней и задней оси, правого и левого колес, и о способности колеса в каждый момент воспринимать нагрузку по трем направлениям.
Задача повысить площадь контакта колес с дорогой не так проста, как кажется.
Конечно же, можно «зажать» подвески и сделать перемещения меньше. Это полезно со многих точек зрения, и часто так и поступают, но ведь перемещения можно использовать для благого дела. Например, чтобы колеса в повороте поворачивались сами. Если сложно рассчитать перемещения, то можно немножко подыграть им, поставив рулевое управление и на заднюю ось, создав полноуправляемую машину.
А можно задать перемещение с помощью усложненной подвески — например, многорычажной, которая позволяет настраивать геометрию движения колеса в очень широких пределах и сохранять эти параметры при износе элементов длительное время.

Статьи / Практика
Я твой подвеска рычаг шатал: как проводят диагностику ходовой части
Зачем нужна диагностика? Начнём с простого вопроса: почему иногда нужно проверять подвеску? Первый случай – хрестоматийный. То есть что-то внизу стучит, лязгает, щёлкает, а иногда – грохочет и отдаёт в руль и пятую…
44385 4 29
Если вы не гонщик, это не означает, что управляемость для вас не важна. Просто в вашем случае этот термин означает совсем иной набор предпочтительных параметров, нежели идеальная точность и быстрота реакций. Собственно, активная безопасность машины во многом зависит от ее управляемости, и потому над этими параметрами конструкторы автомобилей работают много и продуктивно. А какое отношение это имеет к геометрии шасси?
Как машина поворачивает
Казалось бы, чего проще: повернул передние колеса — и машина повернула. Но на практике все заметно сложнее. Для начала даже на стоящей машине повернутся не только передние колеса. Поскольку у передней подвески есть угол кастора, то передние колеса при повороте поднимутся, каждое на свою высоту. На сколько — зависит от ширины и твердости резины, геометрии подвески и так далее.
Машина в результате получит некоторый крен, в зависимости от высоты центра крена передней и задней подвесок и положения центра масс в этот момент. Задние колеса или даже неразрезной задний мост тоже повернутся — просто в силу того, что при любом изменении положения кузова колеса не просто ходят вверх-вниз, а тоже чуточку, но поворачивают.
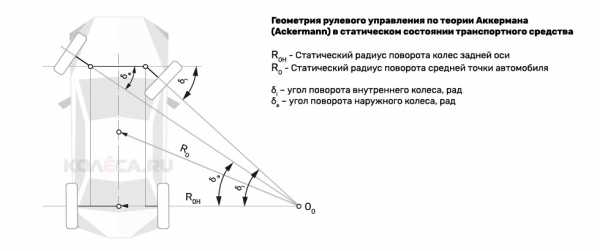
В динамике к этой куче параметров добавятся кренящий момент от центра масс машины и уводы резины. Среди всех параметров, которые необходимо рассчитать, для нас наибольшее значение будет иметь мгновенный центр поворота и радиусы поворота передней и задней осей и центра масс. Мгновенный центр поворота совсем не совпадает с геометрическим, который вычислен по правилу Аккермана – точкой, в которой находятся центры окружностей качения всех колес. Более того, в динамике такой точки просто не существует из-за скольжений. Но на рисунках для примера рассмотрена более простая ситуация, чтобы не наводить путаницы.

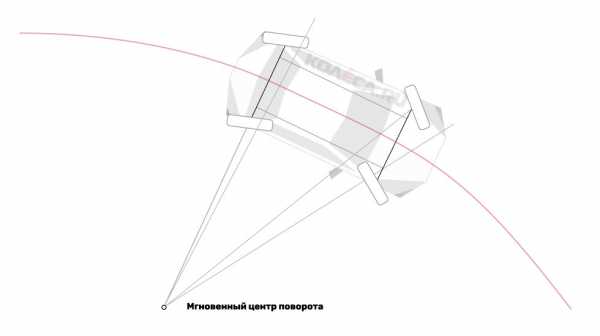
На первый взгляд, если доворачивать задние колеса в противоположную от передних сторону, то уменьшается радиус поворота машины. Это важно с точки зрения удобства эксплуатации и маневренности. Чем меньше радиус, тем удобнее. Но машины ездят не только на скоростях погрузчиков в торговом центре, так что приходится учитывать и другие факторы.
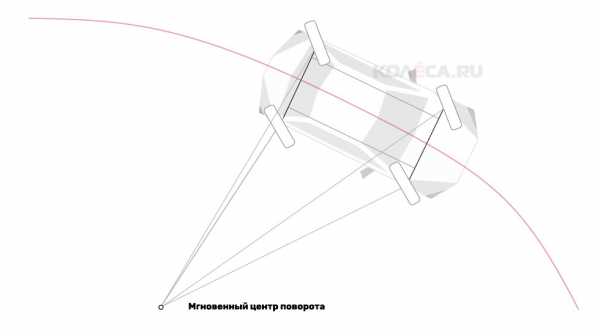
А что если поворачивать колеса в ту же сторону, что и передние? На первый взгляд, бессмыслица: машина «поедет боком» по большому радиусу, если задние колеса повернуты на меньший угол, чем передние. Сам по себе больший радиус поворота означает, что станет меньше перераспределение нагрузок между правыми и левыми колесами, а значит лучше сцепление колес с дорогой и комфорт.
Но, кажется, того же можно добиться, просто повернув руль на меньший угол? Можно это сделать даже автоматически — благо, рулевые механизмы с переменным шагом сейчас не редкость. Но при повороте задних колес в сторону поворота еще и уменьшается угол увода задней оси, а значит, и склонность к избыточной поворачиваемости. Если совсем просто – машина становится более устойчивой к возникновению заноса. На высоких скоростях это крайне важно.
Схожий эффект можно было бы получить простым увеличением колесной базы. Но размеры машин ограничены — зато с помощью изменения угла поворота задних колес можно получить желаемое, не увеличивая габаритов. А для короткобазной машины это просто спасение: можно сохранить сочетание устойчивости на дороге, характерное для больших машин, не отказываясь от хорошей поворачиваемости.
Не только управлением
Для устойчивости на дороге заднее колесо в повороте должно поворачиваться в сторону поворота передних, а для лучшей маневренности – в противоположную. Если с маневренностью особых сложностей нет, то можно использовать для доворота колес особенности движения машины в повороте. Например, наличие крена. При сжатии подвеска будет доворачивать колесо, и мы получим желаемое.

Статьи / История
Мягкость и жесткость подвески – что важнее для комфорта?
Специалисты-подвесочники могут рассказать множество интересных примеров из практики, а мне придется ограничиться лишь кратким рассказом о том, почему жестче не всегда цепче, а мягче не всегда…
75668 0 37
Но тут есть две проблемы. Во-первых, подвеска таким же образом реагирует на изменение нагрузки, а хотелось бы, чтобы управляемость меньше зависела от нагрузки и больше от собственно крена и боковых усилий. Во-вторых, на заднеприводных машинах очень соблазнительно привязать поворот колес к вектору тяги.
Если усложнять подвеску, вводя рычаги, которые воздействуют на углы установки колес при определенной нагрузке, то мы получим многорычажную подвеску. Да, ту самую, которая появилась на Mercedes W201 и сейчас применяется на большинстве машин С-класса и выше. Причем не только на задней оси, но и на передней.
Именно многорычажная подвеска позволила получить тот же эффект, что и принудительный поворот задней оси, и отказаться от применения сложных систем принудительного поворота на четверть века. Система рычагов в такой подвеске задает сложную траекторию движения колеса в зависимости от продольной, поперечной и вертикальной нагрузок.
Можно довольно точно настроить геометрию шасси с учетом того, как машина будет вести себя при появлении значительных боковых сил, при разном соотношении вертикальной и поперечной нагрузок. Для заднеприводных машин это оказалось серьезным подспорьем в борьбе за лучшую управляемость с самого начала, а переднеприводные примерили подобные технологии чуть позже, с ростом массы, нагрузок и требований уже к их управляемости.
Первые полноуправляемые легковушки
Машины с двумя управляемыми осями создавали вовсе не для отличной управляемости. Такие машины вообще не ездили по шоссе на большой скорости, потому что это были вездеходы. Например, знаменитый Unimog – универсальное шасси повышенной проходимости имеет все четыре управляемых колеса. Разумеется, для того, чтобы лучше ехать по бездорожью и маневрировать в ограниченном пространстве.
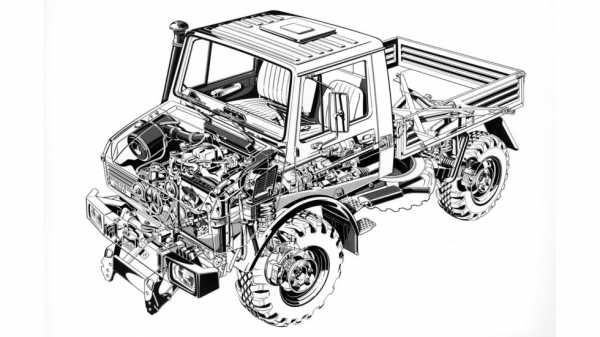
На фото: Mercedes-Benz Unimog U 1000
Японские машины начала 80-х годов по сложности конструкции недалеко от них ушли. На Honda Prelude 1987 года была задняя рулевая рейка и вал, связывающий ее с рулевым колесом, и система работала в зависимости от угла поворота колес. На малых углах поворота задние колеса поворачивались в ту же сторону, что и передние, а при больших — в противоположную. Даже в таком виде эффект оказался достаточным, чтобы подобную технологию внедрили и другие японские производители.

На фото: Honda Prelude 1987
Только на следующих поколениях привод задней рулевой рейки стал уже электрическим, а угол поворота зависел и от скорости, на которой совершался маневр. Впрочем, от валов и рейки избавиться не догадались. Конструкции оставались сложными, массивными, объемными и дорогими. Как итог — машины с ними не снискали особой популярности и продавались только на внутреннем японском рынке. Во всем остальном мире безоговорочное лидерство захватили многорычажные подвески.
Почему снова появляются полноуправляемые шасси
Самый очевидный ответ на этот вопрос — снижение цены на приводные механизмы и электронику управления и развитие систем устойчивости и безопасности. На новом технологическом уровне отказались от задних рулевых трапеций и реек. Многорычажные подвески обеспечивают уже достаточный угол доворота колес для реализации нужного эффекта. Осталось оснастить их вместо рычага, отвечающего за доворот колеса, активным электрическим или гидравлическим приводом.
Электроника куда точнее определяет, что происходит в данный момент с машиной, позволяет использовать большие углы доворота, и к тому же дешевле в настройке, чем сложная подвеска. И как дополнительный фактор – то самое улучшение поворачиваемости на малых скоростях. Можно довернуть колеса в противоположную сторону и улучшить маневренность машины на узких улочках.
Не удивлюсь, если подобные системы в ближайшее время будут массово внедряться на машинах от С-класса и выше, причем в сочетании с упрощенной геометрией задней подвески — например, не с многорычажками, а со скручиваемой балкой. Экономический смысл в этом определенно есть, ведь можно получить управляемость, как у более дорогих машин, при меньших затратах. Да и еще один сложный и дорогой изнашиваемый узел «лишним» не будет. Ведь производители авто, кажется, взяли обязательство сделать машину одноразовой.
www.kolesa.ru
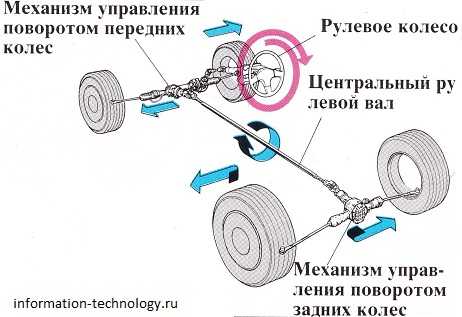
Система четырехколесного руления (4WS)
Когда водители управляют обычным автомобилем, они поворачивают рулевое колесо, и вслед этому движению передние колеса меняют свое направление — в то время как задние колеса постоянно направлены прямо вперед.
Такова стандартная система, называемая «двухколесное руление» или, сокращенно, 2 WS. Однако некоторые фирмы сейчас выпускают автомобили с четырехколесным рулением (4 WS). Системы 4 WS разных фирм отличаются друг от друга, но в большинстве из них задние колеса поворачиваются в ту же сторону, что и передние, если автомобиль делает вираж на большой скорости. На малых скоростях направление поворота задних колес при 4 КР противоположно направлению поворота передних. Такая особенность позволяет, в частности, совершать более крутые повороты, что полезно при движении по городу или при парковке в тесных местах. Дорожные испытания систем 4 WS показали, что подобные системы обеспечивают большую безопасность движения. И все же четырехколесное руление не получило пока еще широкого распространения. Из-за того, что стоимость системы 4 WS, по мнению водителей, не оправдывает получаемых с ее помощью преимуществ.
Два колеса против четырех
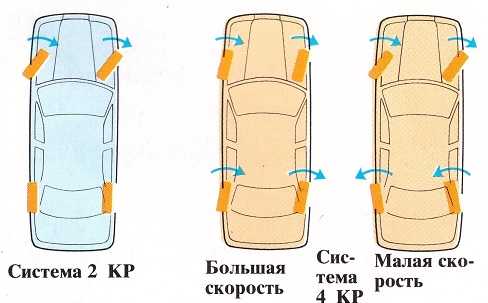
В 2 КР автомобилях (внизу слева) поворачиваются лишь передние колеса. Если же меняет направление движения 4 КР автомобиль, то могут поворачиваться все четыре колеса (справа).
Как 4 КР поворачивают колеса

Допустим, две машины: 2 КР (голубая) и 4 КР (желтая на рисунке над текстом) начинают с одного места (зеленого) делать медленный крутой поворот. Благодаря повороту задних колес машина 4 КР поворачивает круче машины 2 КР и, значит, ей требуется меньше места для поворота.
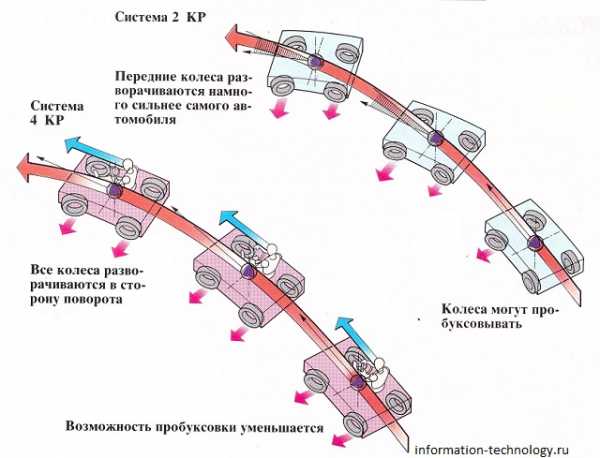
Если эти две машины будут совершать плавный широкий поворот (как показано на правом рисунке), то все колеса машины 4 КР идут, как говорят, колея в колею, и таким образом обеспечивается более надежное сцепление колес с дорожным полотном.
Смена полосы движения
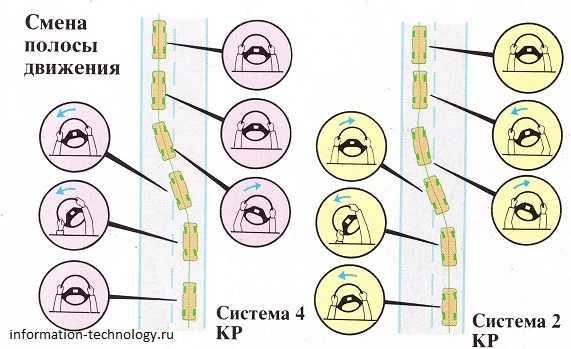
Если водитель перестраивается в другую полосу на скоростном шоссе, то у 2 КР автомобиля проявляется «эффект рыбьего хвоста»: его заднюю часть заносит, потому что задние колеса стремятся идти по старому направлению. Чтобы исправить такое положение, водителю приходится дважды поворачивать рулевое колесо до смены полосы и дважды поворачивать его после смены полосы. У 4 КР автомобиля нет эффекта рыбьего хвоста.
Рулевое колесо и система 4 WS
чувствительные датчики в системе 4 КР следят за тем, насколько повернуто рулевое колесо и, следовательно, передние колеса в каждый момент времени (красная линия на рисунке). Когда угол поворота руля невелик (первые две колонки), система 4 КР оставляет задние колеса прямо или слегка разворачивает по направлению передних колес. При более резких поворотах — когда рулевое колесо делает более одного полного оборота (четвертая колонка) — система 4 КР поворачивает задние колеса в противоположную сторону.

information-technology.ru
Задние поворотные колеса на Porsche 911 GT3
Заднее рулевое управление.

Идея сделать задние колеса управляемыми является хорошо забытым старым. На самом деле сделать управляемыми задние колеса зародилась еще во времена деревянных повозок (так называемые безлошадные повозки). Но компания Porsche в своей новой модели 911 GT3 решила вспомнить старую идею и, используя современные технологии, оснастить свою новинку управляемыми задними колесами.

Почему в старые времена на повозках делали управляемые задние колеса? Как правило, большинство повозок использовались в сельской местности для сельского хозяйства, где актуальность ограниченного разворота или поворота, как никогда очень важна. В новом уникальном спорткаре Porsche 911 GT3 система управляемых задних колес представляет собой уникальные разработки Немецкой компании.
С момента появления официальной информации о новинке, не утихали споры о том, как компания Порше реализовала систему управления задних колес, так как подробного релиза о системе не было представлено. Сегодня наше интернет издание 1ГАИ.РУ предлагает Вам два подробных видео ролика, из которых Вы узнаете, как поворачивают вместе с передними, задние колеса, которые помогают спортивному автомобилю не только с легкостью проходить повороты, но и увеличивают динамику при разгоне.
В целом идея оснастить автомобиль Порше задними управляемыми колесами это отличное решение для спорткара. Было бы глупо, если подобная система появилась бы на традиционных городских автомобилях. Конечно, новая технология имеет большую сложность в конструкции, из-за чего вырастает риск сложного ремонта в случае поломки, но для тех, кто покупает подобные автомобили, мы думаем, что для них главное непередаваемые ощущения, которые может дать этот мощный спорткар, чем технические сложности конструкции.
Видео
Справка 1ГАИ.РУ: Система управления колесами задней оси Porsche — это электромеханическая система регулирования задних колес. Данная система позволяет автомобилю проходить повороты любой сложности под разным углом.
На небольших скоростях задние колеса регулируются не синхронно с передними, чтобы обеспечить устойчивое прохождение поворотов. При большой скорости, как передние, так и задние колеса поворачиваются синхронно. Благодаря своеобразному изменению на короткое время размера колесной базы, автомашина, оборудованная данной системой более динамична и устойчива на дороге. Во время спортивных соревнований система управления задними колесами позволяет с преимуществом обходить соперников на поворотах.
Смешно о Porsche
Почему заводские гонщики Порше не умеют параллельно парковаться
www.1gai.ru
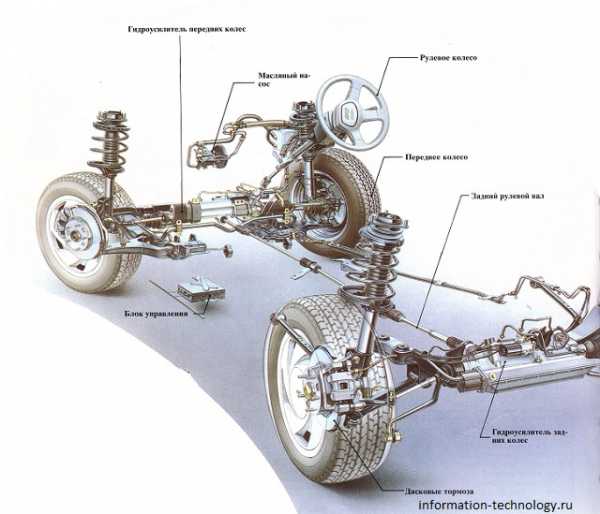
Обоснование параметров конструкции рулевого привода задних управляемых колес трехосных машин
Обоснование параметров конструкции рулевого привода задних управляемых колес трехосных машин
автор: Мурог И. А.
УДК. 629.33
Россия, ФГБОУ ВПО «ЮУрГУ» (НИУ)
Рулевой привод обеспечивает кинематическую связь управляемых колес автомобиля между собой и с управляющим устройством. Одним из важных требований, предъявляемых к рулевым приводам, являются кинематические связи между колесами, рациональные с точки зрения управляемости, устойчивости и маневренности [1]. Особенное значение имеет требования обеспечения устойчивости движения для рулевых приводов автомобилей с передними и задними управляемыми колесами, наличие которых определяет существенные особенности динамики автомобиля. Кроме того, конструкция рулевого привода должна быть согласована с конструкцией подвески автомобиля, обладать высоким КПД, достаточной жесткостью, эффективно демпфировать возникающие колебания [2].
На основе проведенных ранее исследований установлено, что для устранения недостатков, присущих транспортным средствам с передними и задними управляемыми колесами (УК) необходимо, чтобы угловая скорость поворота задних колес была меньше угловой скорости поворота автомобиля, и боковая реакция на задней оси не меняла свой знак. Поэтому существует необходимость применения рулевого привода задних управляемых колес с переменным передаточным числом [3].
1 Определение соотношения угловой скорости поворота задних управляемых колес и угловой скорости автомобиля
Для обеспечения необходимого соотношения угловой скорости поворота задних управляемых колес и угловой скорости автомобиля для изменения угла поворота задних колес примем зависимость
, (1)
где а, b, с – постоянные коэффициенты, при этом с < 0, b > 0; x– угол поворота передних колес; y– угол поворота задних колес; е – основание натуральных логарифмов.
График, описываемый зависимостью (1), в общем виде представлен на рисунке 1. Для реализации зависимости изменения угла поворота задних колес, близкой по характеру к запаздыванию относительно передних, точка перегиба должна находиться на уровне значения угла запаздывания. Для обеспечения кинематического согласования при максимальных углах поворота управляемых колес вторая производная в точке экстремума (точка b) зависимости должна быть равна нулю, а значение функции должно быть равно максимальному углу поворота передних управляемых колес.
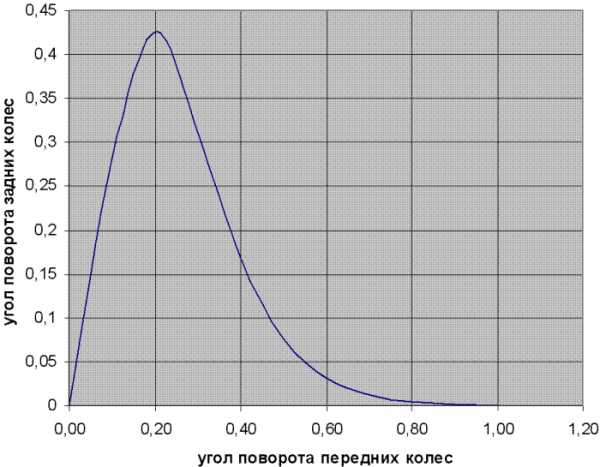
Рисунок 1 – Соотношение углов (рад) поворота управляемых колес
Таким образом, для нахождения значений коэффициентов а, b и с необходимо решение системы уравнений
(3) |
где значения коэффициентов q и p определяются из выражений
Решая полученную систему уравнений, получим формулы (3), (6), (7) для расчета значений коэффициентов b, c и a в зависимости от максимального угла поворота передних колес и угла запаздывания, выбираемого для конкретного автомобиля.
Численные значения коэффициентов для угла запаздывания Өα = 0,07 рад и максимального угла поворота управляемых колес Өlmax 0,3 рад равны: а = 383,6; b = 2,55; с = -13,5.
При использовании зависимостей (1)…(7), возможен расчет значения угла поворота задних управляемых колес в зависимости от передних колес при различных значениях максимальных углов поворота передних управляемых колес (УК) и для запаздывания поворота задних колес от передних.
2 Анализ влияния чувствительности автомобиля к повороту рулевого колеса на максимальную скорость движения
Изменение чувствительности к повороту рулевого колеса для автомобиля, имеющего рулевой привод с запаздыванием, при изменении передаточного числа рулевого механизма особенно заметно на малых скоростях движения. При увеличении скорости эта разница постепенно уменьшается и при увеличении передаточного числа с 25 до 27 на скорости движения 17 м/с чувствительность автомобиля к повороту рулевого колеса практически не изменяется. Необходимо отметить, что повышение передаточного числа рулевого механизма способствует повышению устойчивости движения при выполнении маневра «рывок руля» [3].
При использовании в рулевом управлении привода с переменным передаточным числом уменьшение передаточного числа рулевого механизма вызывает увеличение чувствительности автомобиля к повороту рулевого колеса в рассматриваемом диапазоне изменения скоростей движения автомобиля.
При использовании в рулевом приводе устройства запаздывания, максимальная скорость выполнения маневра при минимальном передаточном числе рулевого механизма, равном 17, выше, чем для рулевого привода с переменным передаточным числом (14 м/с и 12 м/с соответственно).
Необходимо также отметить, что значения максимальной скорости, полученной для рулевого привода с устройством запаздывания при выполнении маневра «рывок руля», получены благодаря малому углу поворота задних УК в заданных условиях. Кроме того, данный маневр позволяет оценить главным образом, устойчивость движения автомобиля. Применение на рассматриваемых типах автомобилей рулевого привода с переменным передаточным числом или устройством запаздывания позволяет повысить устойчивость движения по сравнению с рулевым только передних управляемых колес, сохранить показатели маневренности.
3 Схема рулевого управления транспортного средства с передними и задними управляемыми колесами
На рисунке 2 представлена схема рулевого управления транспортного средства с передними и задними управляемыми колесами [4].
Рулевое управление транспортного средства с передними и задними управляемыми колесами содержит рулевое колесо 3, кинематически связанное через рулевой механизм 2 с корпусом распределителя 4, золотник которого кинематически связан с исполнительным цилиндром 1. рулевым приводом передних управляемых колес и с кривошипами мальтийского механизма 9. Механизм 9 кинематически связан с корпусом распределителя 7 задних управляемых колес, золотник которого связан с исполнительным гидроцилиндром 6 и рулевым приводом задних управляемых колес. Рулевое управление содержит насос 5, обеспечивающий подачу рабочей жидкости из бака 11 в распределители 4 и 7, гидравлически связанные с цилиндрами 1, 6 соответственно и баком 11 через фильтр 10.
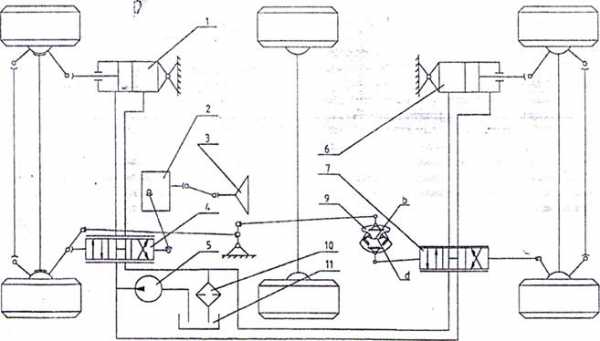
1 – цилиндр; 2 – рулевой механизм; 3 – рулевое колесо; 4 – распределитель передних управляемых колес; 5 – насос; 6 – гидроцилиндр; 7 – распределитель задних управляемых колес; 9 – мальтийский механизм; 10 – фильтр; 11 — бак
Рисунок 2 – Рулевое управление с передними и задними управляемыми колесами
Рулевое управление работает следующим образом.
При отсутствии управляющих воздействий на рулевое колесо и прямолинейном движении транспортного средства золотники распределителей 4 и 7 находятся в нейтральном положении, сообщая напорные магистрали насоса 5 со сливом. Фиксация креста мальтийского механизма 9 в неподвижном положении при отсутствии управляющих воздействий осуществляется запирающими дугами.
При повороте рулевого колеса 3 управляющее воздействие передается через рулевой механизм 2 распределителю 4, смещая его корпус относительно золотника, открывая доступ рабочей жидкости, закачиваемой из бака 11 насосом 5 к рабочим полостям гидроцилиндра 1. Одна из полостей гидроцилиндра 1 сообщается с напорной магистралью насоса, другая со сливом, в результате чего перемещается шток гидроцилиндра 1, вызывая поворот передних управляемых колес, перемещение золотника распределителя 4 и кривошипов механизма 9. Цевка одного из кривошипов (в зависимости от направления поворота) входит в зацепление с крестом механизма 9, вызывая его поворот относительно своей оси, что ведет к смещению корпуса распределителя 7 относительно его золотника, открывая доступ рабочей жидкости, к рабочим полостям гидроцилиндра б. Одна из полостей гидроцилиндра 6 сообщается с напорной магистралью насоса, другая – со сливом, в результате чего перемещается шток гидроцилиндра 6, вызывая поворот задних управляемых колес и перемещение золотника распределителя 7, обеспечивая обратную связь по перемещению.
Выводы
Применение механического рулевого привода, реализующего предложенный закон регулирования угловой скорости поворота задних управляемых колес, позволяет повысить критическую скорость выполнения маневра «рывок руля».
Предложенный рулевой привод с переменным передаточным числом обеспечивает более высокую чувствительность к повороту рулевого колеса при небольших углах его поворота. Плавное изменение чувствительности рулевого управления при повороте рулевого колеса и более высокая жесткость привода обеспечивают лучшие эргономические характеристики рулевого привода с переменным передаточным числом.
Список литературы
1. Аксенов П.В. Многоосные автомобили: теория общих конструктивных решений. М.: Машиностроение, 1980. 207 с.
2. Гладов Г.И., Вихров А.В., Зайцев С.В., Кувшинов В.В., Павлов В.В. Конструкции многоцелевых гусеничных и колесных машин: учебник для студ. высших учеб. заведений / под ред. Г.И. Гладова. М.: Издательский центр «Академия», 2010. 400 с.
3. Проектирование полноприводных колесных машин: учебник для вузов. В 3 т. Т. 3 / Б.А. Афанасьев, Б.Н. Белоусов, Л.Ф. Жеглов и др.; под ред. А.А. Полунгяна. М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. 432 с.
4. Мурог И.А., Трач С.И. Рулевое управление транспортного средства с передними и задними управляемыми колесами: пат. № 2160205 РФ. 2001.
engineering-science.ru
Как ездить на автомобиле быстро и безопасно: victorborisov — LiveJournal
Хочу поделиться навыками раллийного управления автомобилем, которые применимы в любых дорожных ситуациях независимо от типа привода на вашем автомобиле. Я категорически против термина «контраварийная подготовка», т.к. не нужно учиться выходить из критических ситуаций, для вас любая, даже на первый взгляд, критическая ситуация, должна быть абсолютно штатной и вы должны четко осознавать что происходит с автомобилем в данный конкретный момент времени.
Не буду грузить большим количеством теории, а постараюсь тезисно и с помощью небольших иллюстраций изложить основные принципы управления автомобилем.
В безопасном и эффективном управлении автомобилем нет никаких чудес или тайн, все основано исключительно на понимании законов физики и правильном их применении. Еще один важный момент — совершенно не важно какой тип привода у вашего автомобиля: принципы управления идентичны для любого типа привода. При этом самый быстрый и безопасный — полный привод, на втором месте — передний привод, и самый медленный и сложный в управлении — задний привод. Единственная дисциплина, где актуален задний привод — дрифт. Во всех иных дисциплинах он находится в аутсайдерах. В качестве образца для обучения мы возьмем полноприводный Subaru Outback 5 поколения.
Итак, начнём с основы основ — правильной посадки за рулём. Основная задача правильной посадки это прочная фиксация водителя в кресле и удобный доступ к рулевому колесу. Водитель должен чувствовать автомобиль пятой точкой, это позволит ему лучше понимать какие действия от него потребуются в той или иной ситуации.
1. Левая нога всегда должна находится на площадке для отдыха. Этим вы обеспечиваете своему телу дополнительный упор во время перегрузок, которые будут возникать во время движения.
2. Колени должны быть слегка согнуты в положении когда правой ногой вы выжимаете педали до упора.
3. Поясница должна быть максимально прижата к спинке сиденья.
4. Плечи должны быть постоянно прижаты к спинке сиденья.
5. Расстояние до рулевого колеса должно быть таким, чтобы вы могли положить запястье на вершину рулевого колеса не отрывая плечо от спинки сиденья.
6. Между коленями и рулевым колесом должно быть не менее 10 сантиметров.
Если коротко, то поставьте спинку кресла практически в вертикальное положение, рулевое колесо вытяните до упора на себя и вверх. Если вы привыкли ехать в лежачем положении — срочно переучивайтесь, это небезопасно.
Всё, что вам нужно знать о положении рук на рулевом колесе. Допустимо слегка смещать руки в пределах 9-10 и 2-3 часов если ориентироваться по стрелочному циферблату, но никакие другие положения рук на руле недопустимы! Обращаю особое внимание — на руле находятся обе руки. Для чего это нужно? В случае необходимости экстренного выполнения маневра (из-за угла вылетает на вашу полосу Камаз), вы не сможете его выполнить одной рукой.
Следующий важный момент — руление. Забудьте о рулении с перехватами раз и навсегда! Рулить с перехватом необходимо при маневрировании на парковке, во всех иных ситуациях в этом нет необходимости. Итак, смотрите на фото. Максимальные углы поворота рулевого колеса от нулевого положения: 180 градусов налево, 180 градусов направо. Всё! Этого достаточно для прохождения даже особо крутых скоростных поворотов. Бейте себя по рукам как только вам захочется повернуть руль в условиях трассы на больший угол т.к. это банально бесполезно. Еще один «бонус» такой методики — вы всегда в любой момент времени знаете куда и на какой угол у вас повернуты колеса.
Теперь переходим к главному — законам физики. Если вы понимаете, что происходит с автомобилем — вы можете им управлять. Важно понимать каким образом распределяется вес автомобиля по осям в той или иной ситуации.
Итак. Первая ситуация — разгон. У любого автомобиля, независимо от типа привода, во время разгона вес по осям распределяется следующим образом. Передние колеса — разгружаются, задние — нагружаются. Что это значит? В первую очередь то, что если передние, управляемые, колеса разгружены — то ни о каком маневрировании не может быть и речи. Куда вы собрались поворачивать, если у передних колес плохое сцепление с дорогой? Поэтому запоминаем: во время разгона никаких маневров рулем!
Следующая ситуация — торможение. В момент торможения происходит обратная ситуация, задние колеса — разгружаются, передние — максимально нагружаются (вес автомобиля + инерция). Что это значит? Это значит, что именно в конце цикла торможения у передних, управляемых, колес имеется максимально возможное сцепление с дорогой. Именно в конце цикла торможения необходимо выполнять маневрирование. Причем очень важно начать маневрирование моментально, без паузы, т.к. задержка приведет к тому, что будет потеряна загрузка передней оси и следовательно повышенное сцепление передних колес с дорогой.
Теперь о связи педали акселератора и углах поворота рулевого колеса. Как мы уяснили ранее — разгоняемся мы только на прямых колесах. Именно когда руль стоит прямо вы имеете право полностью утопить правую педаль в пол. А чем больше угол отклонения рулевого колеса от нулевого положения — тем меньше предельные обороты двигателя в данный момент. Этот момент нужно натренировать на уровне рефлексов. Еще научите себя плавно работать с педалью газа. Никаких «нажал-отпустил» (это пригодится далее, при тренировке боковых скольжений).
Подробнее изучим протектор на шинах. Обратите внимание на небольшие поперечные канавки-ламели — именно они (вместе с шипами) обеспечивают сцепление колес с дорогой. Именно поэтому разгоняться и тормозить нужно только на ПРЯМЫХ колесах.
Вот хороший пример. Автомобиль движется прямо, вы резко поворачиваете руль в сторону. Ламели на протекторе встают практически параллельно направлению движения автомобиля. Очевидно же, что в таком положении сцепление у шин в разы хуже, чем когда колеса стоят прямо. Это справедливо как для моментов ускорения, так и торможения.
Эффективнее всего тренироваться зимой на льду замерзшего водоема. Это связано с тем, что на льду очень низкое сцепление шин с дорогой и без использования загрузки передней оси на торможении — выполнить маневр будет просто невозможно. Если же тренироваться на сухом асфальте, то у шин будет отличный «держак» даже в предельных режимах — в результате вы можете делать всё совершенно неправильно, но при этом вас будут спасать шины.
Для тренировок вне дорог общего пользования рекомендуется отключать как минимум контроль тяги (traction control), а как максимум — полностью систему курсовой устойчивости (ESP). Контроль тяги отключается абсолютно на всех автомобилях и отвечает за возможность увеличить обороты двигателя, если электроника определит пробуксовку ведущих колес и ограничит тягу. Систему курсовой устойчивости на современных автомобилях обычно делают неотключаемой ради вашей же безопасности. Иногда можно услышать — «Мне ESP мешает нормально ехать». Запомните, этот человек совершенно не умеет управлять автомобилем, при этом считает себя «профессионалом». Итак, чтобы «подружиться» с системой курсовой устойчивости надо знать как она работает.
Работает она невероятно просто. Для работы она использует квази-гироскоп (датчик угловой скорости вращения автомобиля вокруг вертикальной оси), акселерометр, датчики вращения колес и датчик угла поворота рулевого колеса. Вмешаться в управление она может двумя способами: выборочное подтормаживание колес, ограчение подачи топлива. Откуда система стабилизации «знает» что нужно сделать? Всё элементарно просто! Система стабилизации пытается направить автомобиль туда, куда хочет водитель. Она вычисляет желаемую водителем угловую скорость вращения автомобиля вокруг вертикальной оси (датчик положения руля + скорость автомобиля по датчикам вращения колес) и сравнивает её с угловой скоростью вращения автомобиля вокруг вертикальной оси (по сигналу с квази-гироскопа). Если угловые скорости не совпадают — то система пытается изменить скорость вращения автомобиля (путём выборочного подтормаживания колес и ограничением подачи топлива). Для водителя проще всего ориентироваться так: куда повернуты колеса — туда и будет направлять автомобиль система стабилизации.
Из этого делаем элементарный вывод — если ехать правильно (даже с боковыми скольжениями), то система стабилизации вмешиваться в работу не будет.
Еще один момент — во время тренировок не пытайтесь использовать спортивный или ручной режим коробки передач. Первый увеличивает чувствительность педали акселератора, чем усложняет процесс обучения, второй — просто отвлекает на ненужные действия, поверьте, электроника лучше знает когда нужно переключаться.
Переходим непосредственно к поворотам. В них вся суть эффективного управления автомобилем, т.к. на прямой дороге все решают только лошадиные силы под капотом, а вот на поворотах все зависит от мастерства водителя. Сейчас не будем подробно останавливаться на траекториях прохождения поворотов, единственное, что отмечу — любой поворот нужно стараться проходить по той траектории, при которой угол поворота руля будет минимальным.
Итак, алгоритм действий очень прост. Любой поворот разбивается на три этапа.
1. Торможение. Как помним из прошлых тезисов руль на этом этапе стоит строго прямо. Тормозить нужно интенсивно и обязательно четко рассчитывать дистанцию до точки, в которой будет начат следующий этап. Важно, чтобы вы могли начать следующий этап без паузы после торможения. Чем круче поворот и чем выше скорость — тем интенсивнее нужно тормозить. На скоростных плавных дугах не обязательно нажимать тормоз, иногда может быть достаточно просто сбросить газ. На этом этапе важно научится чувствовать как под сброс газа и/или торможение автомобиль «клюет носом».
2. Маневрирование. Четким движением рук вы поворачиваете руль на нужный угол, чтобы направить автомобиль в поворот. В этот момент вы задаете новый вектор движения для автомобиля. Передние управляемые колеса максимально загружены и имеют превосходное сцепление с дорогой. Этот этап проходится на ровном газу.
3. Распрямление траектории. Как только вы пройдете вершину поворота по касательной — плавно возвращайте руль в нулевое положение одновременно добавляя тягу. Как только руль встанет прямо — можно начинать интенсивно разгоняться.
Связки поворотов проходят аналогичным образом, с той лишь поправкой, что нужно планировать действия не только на ближайший поворот, но и сразу на следующий. Это важно в тех случаях, когда повороты имеют различную крутизну и не стоит пытаться пройти первый поворот по кратчайшей траектории т.к. в этом случае вы не попадете на начало оптимальной траектории для прохождения следующего поворота.
Теперь давайте познакомимся с такими явлениями, как снос и занос, которые большинство водителей путает и не видит разницы. Усугубляет ситуацию терминология, которая допускает возникновение «заноса передней оси». Чтобы не путаться, предлагаю внести ясность. Итак, снос — это потеря сцепления с дорогой у передних управляемых колес автомобиля. Занос — это потеря сцепления с дорогой у задних колес автомобиля. Ни того, ни другого не нужно бояться, т.к. это абсолютно штатные режимы управления автомобилем. Возникновение заноса или сноса указывает на то, что вы допускаете ошибки в управлении автомобилем, но чем раньше вы среагируете, тем будет лучше.
Еще раз посмотрим на распределение массы автомобиля по осям. Случай первый — вы повернули руль на скорости, не используя прием загрузки передней оси. Что произойдет? Верно, передние управляемые колеса потеряют сцепление с дорогой, автомобиль продолжит движение по той траектории по которой он двигался ранее. Снос передней оси может возникнуть на входе в поворот, когда вы пытаетесь выполнить маневр недостаточно загрузив переднюю ось для данных дорожных условий. Но что произойдет в ситуации, когда вы загрузили переднюю ось интенсивным торможением и во время торможения начали выполнять маневрирование? Произойдет занос задней оси! Ведь в этот момент задние колеса полностью разгружены, а вы еще продолжаете тормозить.
Итак, в случае сноса передней оси единственное, что вам нужно сделать — вернуть обратно сцепление передних колес с дорогой. Поэтому первым делом ставите руль обратно в нулевое положение и тормозите.
Здесь стоит сделать важную ремарку, которую очень тяжело натренировать на уровне рефлексов. Возьмем стандартную дорожную ситуацию. Крутой поворот, вы недостаточно оттормозились, не загрузили переднюю ось, повернули руль и… ничего не произошло. Автомобиль скользя передними колесами уверенно движется в направлении обрыва/отбойника не реагируя на ваши попытки повернуть руль. Самая серьезная ошибка в этой ситуации — попытка повернуть руль в сторону поворота на больший угол. Это прямой путь в отбойник! Объясняю почему. У вас передние колеса уже скользят, если вы повернете их на еще больший угол, то протектор не способен зацепиться за дорогу когда ламели на нём не перпендикулярны направлению движения. Поэтому необходимо поставить руль прямо и тормозить тормозить тормозить! В реальности до края дороги может оставаться несколько метров, но и этого может быть достаточно, чтобы передние управляемые колеса смогли зацепиться за дорогу и дать возможность повторить маневр поворота.
А что же делать в случае заноса? В интернете набирает популярность картинка, на которой показаны варианты действия в случае заноса на переднем, заднем и полном приводе. В ней есть доля здравого смысла, но очень многих она вводит в ступор и непонимание, как же действовать в реальной ситуации. Всё, что вам нужно знать: чтобы погасить занос задней оси автомобиля нужно повернуть руль в сторону заноса и затем вернуть его обратно в нулевое положение. Важно держать ровный газ во время выполнения маневра. Категорически нельзя резко тормозить или ускоряться во время маневрирования (но это мы уже знаем из прошлых тезисов). Только после того, как вы погасили занос поворотом руля в его сторону и последующим возвратом руля в нулевое положение, можно переходить к следующим действиям: здесь всё в ваших руках, ведь руль стоит прямо. Хотите ускорится — нажимайте газ, не вписываетесь в поворот — притормозите.
Теперь самое эффектное (не путать с эффективное) — боковые скольжения (контролируемый занос). Здесь во-первых стоит отметить то, самое важное, различие между автомобилями с разными типами привода. Полноприводные автомобили имеют преимущество над моноприводными в том, что они могут ускоряться во время боковых скольжений. Заднеприводные автомобили в заносе вообще не могут ускоряться, переднеприводные в заносе могут как минимум не терять скорость. И только полноприводные автомобили могут начать набирать скорость ещё во время боковых скольжений.
Быстрое и эффективное управление автомобилем не подразумевает продолжительных боковых скольжений, т.к. любое скольжение это потеря времени в условиях гонки. Поэтому быстрее всех едет тот, кто использует минимальное количество скольжений (используя занос задней оси автомобиля для того, чтобы довернуть его в поворот). Но чтобы ездить без скольжений — надо уметь хорошо ездить «боком», чтобы чувствовать автомобиль.
Небольшая видео-пауза.
Как поставить автомобиль «боком»? Про «ручник» сразу забываем и больше никогда не вспоминаем — это стояночный тормоз и ни для чего, кроме фиксации автомобиля на месте он не должен использоваться!
Лучше вспомним картинку с загрузкой по осям при торможении. Если мы начнём маневрирование во время торможения, то тем самым спровоцируем занос задней оси. Ведь она разгружена, а мы в этот момент тормозим, допуская замедление в том числе и задних колес, одновременно задавая рулем новый вектор движения для автомобиля. В этот момент задняя ось начнёт боковое скольжение.
Теперь важно взять скольжение под контроль и не допустить развития избыточного заноса. Первое, что нужно запомнить: ни в коем случае не отпускать газ (вспоминаем, что работаем с педалью газа очень плавно ориентируясь на текущее положение рулевого колеса), т.к. сброс газа моментально прекратит боковое скольжение. Второе — как только началось боковое скольжение руль нужно моментально вернуть в нулевое положение. Всё, с этого момента автомобиль едет «боком», но дальнейшее маневрирование осуществляется исключительно с помощью педали газа. Допускаются лишь легкие, корректирующие подруливания, на очень небольшие углы.
Во время боковых скольжений вы управляете автомобилем только с помощью педали газа. Если вам необходимо уйти на внешний радиус — плавно прибавляем тягу. Не вписываетесь в поворот — плавно уменьшаем тягу. Еще один важный момент, который хорошо виден на фото. Во время эффективных боковых скольжений руль может быть повернут либо в сторону поворота, либо прямо. Поворот руля в сторону заноса, хоть и выглядит эффектно, но означает одно — вы допустили ошибку и рулем пытаетесь погасить избыточный занос. Если у вас не отключена система стабилизации ESP она вас моментально одернет, как только вы повернете руль в сторону заноса, имейте это ввиду.
Еще один важный момент в общем понимании управления автомобилем в условиях трека. На ровном газу автомобиль может двигаться только по дуге. На любых прямых участках автомобиль должен сначала максимально интенсивно ускоряться и сразу же максимально интенсивно тормозить. Запомните, чем быстрее вы едете, тем сильнее вам нужно тормозить. Это может быть незаметно со стороны, но знайте, что всегда перед маневрированием нужно тормозить, а до начала торможения нужно максимально ускоряться, т.к. этот момент инерции добавится к загрузке передней оси, позволив вам совершить маневр эффективнее.
Конечно в реальных условиях существует еще множество факторов, влияющих на качество сцепления колес с дорогой. Если посмотрите онборд съемки раллийных заездов, то можете обратить внимание на то, что пилоты часто выполняют микроподруливания даже при движении по прямой — на самом деле это один из способов получить обратную связь по наличию зацепа на передних, управляемых колесах. Если автомобиль реагирует на легкое отклонение руля — зацеп есть, если продолжает двигаться по старой траектории — сцепление передних колес с дорогой плохое.
И в завершении онборд съемка, в которой можно я намеренно попытался показать поведение автомобиля при сносе и заносе. Обратите особое внимание на моменты, когда автомобиль сначала не реагирует на вращение рулем и начинается снос передней оси, а потом, после возвращения руля прямо и дотормаживания маневр получается. Аналогично с избыточным заносом задней оси, который приходится гасить быстрым поворотом руля в сторону заноса и последующим возвращением его в нулевое положение.
Вроде хотел кратко попытаться изложить основную суть, а получился текст на 18 тысяч знаков и 24 фотографии-иллюстрации. Надеюсь не сильно загрузил и статья окажется полезной.
Все описанные выше приемы можно и нужно тренировать на дорогах общего пользования (но без отключения системы курсовой устойчивости, и когда поблизости нет попутных или встречных автомобилей). Чтобы освоить безопасное управление автомобилем нужна практи
victorborisov.livejournal.com
Подрулить задком | Veddro.com
Когда мы поворачиваем руль, то соответственно выбранному нами направлению поворачиваются и передние колеса автомобиля. А задние двигаются параллельно. Вроде это очевидно! Но бывает и иначе. Существуют модели авто, у которых задние колеса поворачиваются вместе / одновременно с передними при повороте. Это ведра с так называемыми подруливающими задними колесами или, как их еще именуют, авто с задней подруливающей подвеской, полноуправляемые, или машины с системой 4 Wheel Steer (сокращенно 4WS, в переводе – «4 управляемых колеса», такое название чаще применяется к японским моделям). Причем задние колеса на скорости примерно до 35–40 км/ч (у разных моделей разные скоростные показатели) поворачиваются в противоположную передним колесам сторону, а свыше этого показателя – в ту же сторону.
Вот как это выглядит:
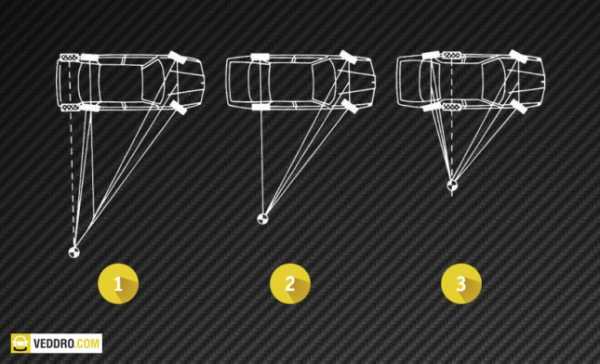
1 – на высокой скорости 4WS-авто
2 – обычный автомобиль
3 – 4WS-авто при парковке или поворотах на небольшой скорости
Зачем это нужно?
Подруливающие колеса были разработаны для улучшения управляемости автомобиля, прежде всего, в поворотах (улучшается чувствительность), а также при разворотах на узких улицах (ведь при спокойной езде по городским проулкам лучше иметь «острое» рулевое управление, а не накручивать рулем, маневрируя) и для более легкой парковки. В общем, такая система улучшает реакцию машины на рулевое управление, стабилизирует крены кузова на большой скорости, а значит – повышает курсовую устойчивость.
На самом деле угол отклонения задних колес у 4WS-авто не велик. Максимум три градуса. И этого хватает для уменьшения угла разворота авто на 60–80 см. Разные автопроизводители настраивают углы поворота по-разному, по-своему. Да и скорость, при которой задние колеса поворачиваются в ту же сторону, куда и передние, разная – диапазон от 30 км/ч до 60 км/ч, бывает и выше.
Для обслуживания системы 4WS и, например, для развала-схождения требуются специальные стенды.
Как это работает?
На заднем подрамнике 4WS-авто электромотор. К нему от блока управления поступают сигналы. И через рулевые тяги электромотор приводит в работу ступицы задних колес.
В свою очередь, в блок питания поступает информация от датчиков скорости колес автомобиля, положения руля и акселерометров, обладающих способностью отличать излишнюю или недостаточную поворачиваемость машины. Здесь же, в блоке, все это «переваривается», обрабатывается, и в случае надобности отправляется сигнал на электромотор, и задние колеса начинают выполнять нужные команды.
Примеры
Применение подруливающих задних колес особенно часто встречается для грузовой, строительной, военной техники, длинных автобусов и пр. В принципе технология как раз была разработана для спецтехники, работающей в небольших пространствах заводских складов, потом перекочевала на серийные авто. На спецтехнике больше угол поворота, вплоть до 15 градусов.
Для легковых управление всеми колесами было особо популярно в 1990-х и до начала 2000-х. Бумом полноуправляемых правили японские производители. Сейчас же такими колесами не особо балуются. Можно встретить, например, на BMW 7-Series (c 2009 года такие задние колеса – часть спортивного пакета), Lexus GS (с 2013-го, значится как опция Lexus Dynamic Handling), на Porsche 991 GT3 и Porsche 991 Turbo (с 2014-го) и пр.
Виды
Задняя подруливающая подвеска может быть активной и пассивной. В первом случае все четыре колеса поворачивают одновременно, реагируя на движение руля. В низкоскоростном режиме, если передние колеса повернуты вправо, задние будут повернуты влево, и наоборот. За счет этого радиус поворота уменьшается до 25%.
А на скорости активная подруливающая подвеска ведет себя так: задние колеса подруливают в ту же сторону, куда и передние, но на меньший угол. За точность угла отвечает электронный блок управления, принимая в расчет показания датчика углового ускорения, датчика скорости и другие параметры.

Пример авто с такой подвеской – Honda Prelude (с 1987 г.).

А если брать что-то более современное, можно встретить баварцев с системой подруливающих задних колес под названием BMW Integral Active Steering.

Пассивный же вариант сейчас пользуется большей популярностью. И это как бы упрощенная система подруливающих колес. В таких авто задняя подвеска строится по особой геометрии и чаще всего с применением подвижной тяги Уатта. Что получается: при совершении поворота на высокой скорости задние колеса за счет перераспределения сил в подвеске имеют тенденцию подруливать в ту же сторону, что и передние. И это делает авто более стабильным. Пример авто с такими задними катками – Ford Focus первого поколения.
Почему сейчас так мало авто с такой технологией? Производители отмечают, что разработки в сфере 4WS ведутся, но сосредоточены больше не на повышении маневренности авто, а на его устойчивости.
Сталкивались ли вы с такими задними колесами? Какие можете обозначить плюсы и минусы?
veddro.com
полный, передний или задний привод?
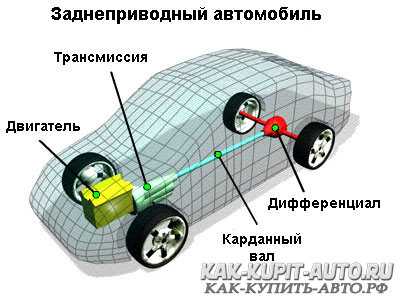
Здравствуйте, уважаемые читатели блога Kak-Kupit-Auto.ru. В сегодняшнем нашем с Вами разговоре, давайте попробуем выбрать привод автомобиля и выяснить какой привод лучше: передний, задний или полный? Привод автомобиля – это одна из важнейших его характеристик, поэтому перед тем, как решить, какой выбрать привод, необходимо разобраться, чем виды приводов автомобиля отличаются друг от друга.

План по выбору привода автомобиля:
Какой привод: передний, задний или полный?
Привод автомобиля определяет, на какие колеса передается тяга его двигателя. Все современные легковые авто имеют по четыре колеса – два передних и два задних, при этом мощность двигателя у автомобиля может передаваться либо на все четыре колеса, либо на одну пару колес – переднюю или заднюю. Чем же отличаются между собой передний, задний и полный привод?
- Передний привод – это когда тяга двигателя передается только на переднюю пару колес. Передние колеса, цепляются за дорогу и тянут за собой весь автомобиль, при этом задние колеса свободно катятся следом.
- Задний привод – это когда мощность двигателя передается только на задние колеса. Они вращаются, цепляются за грунт и как бы толкают автомобиль вперед.
- Полный привод – это когда крутящий момент от двигателя передается на обе оси автомобиля, то есть одновременно на все четыре колеса.

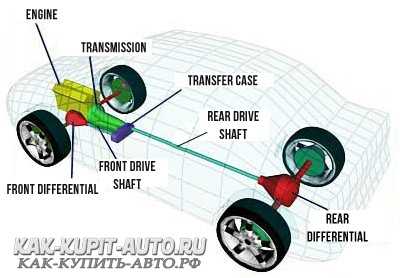
Вообще, полный привод не обязательно должен быть постоянным, и автомобильные конструкторы давно это поняли. Чуть ниже, мы с Вами, дорогие читатели, рассмотрим, какие бывают виды полного привода.
Какой привод безопаснее? Какой привод наиболее безопасен?
Передний привод управляется намного проще, переднеприводый авто труднее пустить в занос, поэтому в качестве первого автомобиля лучше выбирать машину именно с передним приводом. С другой стороны, занос заднеприводного авто легко исправляется интуитивным сбросом газа – отпустил газ и машина вернулась на траекторию. А на переднем приводе занос означает, что водитель перешел все допустимые границы. Вот небольшой пример.
Вызвать занос на передне-приводном авто сложнее, чем на заднем, но и для выхода из заноса на переднем приводе – нужно гораздо большее мастерство. На заднем приводе, занос – это норма и он возникает постоянно, а чтобы его устранить обычно бывает достаточно просто отпустить педаль газа. Можно сказать, что задний привод сразу показывает водителю всю опасность скользкой дороги, а передний – до последнего скрывает ее от водителя. Впрочем, даже для заднего привода есть предел скорости, после которого сброс газа не способен стабилизировать автомобиль. Посмотрите, как может занести заднепрививодный авто.
Что касается полного привода, то с ним все еще сложнее. Полный привод на скользком покрытии может повести себя как передний или как задний, в зависимости от того, под каким колесом скользко. Давайте посмотрим на примере популярнейшей модели Chevrolet NIVA, как может повести себя постоянный полный привод, не оборудованный системой ESP. Это еще раз подтверждает, что полный привод лишь повышает проходимость и улучшает разгонную динамику, но нисколько не улучшает управляемость.
А на этом видео, на скорости в 150 км/ч, автомобиль Audi, оснащенный постоянным полным приводом Quattro, попадает в масляную лужу и срывается в занос. Лишь богатый опыт и стальные нервы пилота позволяют ему выйти из воды сухим и невредимым.
Для переднего привода характерна более высокая курсовая устойчивость, чем у заднего. На заснеженной или грязной трассе передний привод идет, как паровоз по рельсам, в то время, как с задним приводом работать газом на скользкой дороге надо очень осторожно – машину может развернуть.
А вот полный привод снежную кашу, как и бездорожье, переносит даже лучше, чем передний, но если нет межосевого дифференциала, то в поворот он входит неохотно. Будьте осторожны!
Задний привод позволяет быстрее разгоняться, легко входит в занос, но также просто из него выводится, а все это вместе делает езду на заднеприводном авто более интересной. На скользкой дороге, задний привод управляется совсем не так, как передний, но многие водители за это его и ценят. А вообще, если безопасность для Вас не на последнем месте, и Вы хотите не только ездить на автомобиле, но уметь им управлять в любой ситуации, то обязательно посмотрите об этом видео от Главной дороги:
Итак, какой же привод считать более безопасным? Увы, но однозначно ответить на этот вопрос нельзя. Каждый вид привода автомобиля ведет себя по-разному, у каждого свои плюсы и минусы, каждым видом привода надо умело пользоваться, не нарушая законы физики. Но одно можно сказать с уверенностью: если Вам нужен безопасный автомобиль, то он может обладать любым видом привода, главное, чтобы на нем обязательно была включена система курсовой устойчивости – ESP. Эта умнейшая программа способна подтормаживать каждое колесо в отдельности, таким образом, исправляя многие ошибки водителя.
Какой привод самый проходимый?
Действительно, у переднего привода проходимость немного выше, чем у заднего и на это есть, как минимум, две причины. Во-первых, ведущие колеса у переднего привода прижаты к земле весом двигателя, что уменьшает пробуксовки. Во-вторых, ведущие колеса у переднего привода, являются рулевыми, а это позволяет водителю задавать направление тяги.
В случае пробуксовки ведущих колес, водитель передне- или полно-приводного авто может передними колесами вытянуть автомобиль из снежного плена, при этом задние колеса следуют строго следом за передними. Задний привод в такой ситуации ведет себя хуже — задок начинает сносить управлять этим процессом очень сложно.
Передний привод, на скользкий подъем взбирается увереннее, чем задний. Ведущие передние колеса буксуют, но тянут машину к вершине, а задний привод, в такой ситуации, буксует и норовит развернуть автомобиль. Королем скользких подъемов, бесспорно, является его величество полный привод, который поднимается по ледяному склону без пробуксовок.
И все-таки, разъезжая зимой по скользким дорогам, уповать только на полный привод нельзя, ведь его возможности не безграничны. С шипованной резиной, взобраться на скользкий зимний подъем можно на любом приводе, особенно если машина оснащена анти-пробуксовочной системой ESP.

Итак, самым проходимым, конечно же, является полный привод. Задний привод, для штурма бездорожья подходит меньше всего, но и на переднем приводе с твердого покрытия лучше не съезжать.
Задний привод подойдет Вам, если Вы не планируете покидать пределов дорог с твердым покрытием. Если иногда собираетесь совершать рискованные вылазки в поля, то надо брать хотя-бы машину с передним приводом, а для серьезных вылазок на бездорожье Вам понадобится автомобиль, оснащенный полным приводом.
Какой привод быстрее разгоняется?
На сухом асфальте, задний привод разгоняется быстрее переднего. При разгоне вес автомобиля перекладывается на заднюю ось, в то время, как передние колеса разгружаются, вот почему передний привод во время разгона допускает сильные пробуксовки. Но быстрее всего разгоняется автомобиль с полным приводом, естественно, для этого он должен быть оснащен мощным двигателем.

Итак, если Вам нужна машина, которая разгоняется быстрее других, то Вам надо выбирать автомобиль, с задним, а лучше с полным приводом и как можно более мощным мотором.
Какой привод лучше? Передний или задний привод?
Передний привод выигрывает у заднего по такому показателю, как расход топлива. В среднем, передний привод экономичнее заднего, и разница может достигать 7%. А вот полный привод, по экономичности, занимает почетное третье место – он самый прожорливый, во многом из-за этого, больше всего автомобилистов выбирают именно передний или задний привод.

В заднеприводных авто, передние колеса не имеют приводных валов, поэтому максимальные углы поворота рулевых колес, на заднем приводе, больше, а радиус разворота – меньше, что весьма полезно в условиях города.
Передний привод в производстве дешевле заднего, поэтому машины с передним приводом продаются по более доступным ценам. Более низкая цена – это главное преимущество переднего привода перед задним и полным. Именно благодаря низкой цене, передний привод завоевал место самого распространенного из всех видов привода: автомобилей с передним приводом выпускается больше, чем с задним и полным приводом вместе взятых. Второй причиной высокой популярности переднего привода является простота его использования на скользкой дороге, его низкая требовательность к мастерству водителя.
Если выбирать передний или задний привод, то в большинстве случаев передний привод является оптимальным вариантом. Он доступнее, экономичнее, проще в устройстве и менее требователен к мастерству пилота. Задний привод – Ваш вариант, если за плечами у Вас уже есть приличный опыт, и теперь Вы хотите не просто ездить на машине, а получать удовольствие от самого процесса управления автомобилем.

Какой привод автомобиля лучше?
Итак, надо подводить итоги. Если все сильно упростить, то вывод можно сделать такой: лучшим видом привода является полный привод, работающий в паре с системой курсовой устойчивости ESP. Однако, полный привод обходится дороже при покупке и дорог в обслуживании, да и потребляет много топлива. Если же Вам нужно что-то более экономичное, то оптимальным вариантом станет передний привод, который обладает идеальным сочетанием характеристик. Ну а задний привод стоит выбирать, только если у Вас есть опыт и машина нужна Вам, в первую очередь, чтобы получать удовольствие от вождения.
Преимущества переднего привода:
- Низкая цена
- Пониженный расход топлива
- Проходимость выше, чем у заднего привода
- Хорошо держит курс на скользкой дороге

Преимущества заднего привода:
- Разгоняется быстрее переднего
- Проще выходит из заноса

Преимущества полного привода:
- Проходимость на порядок выше
- Разгоняется еще быстрее, чем задний привод
Минусы полного привода:
- Высокий расход топлива
- Высокая цена
- Дорогой ремонт и обслуживание

Основные типы привода мы разобрали, теперь давайте посмотрим, какие есть виды полного привода.
Виды полного привода
Постоянный полный привод

В этом варианте все четыре колеса постоянно соединены с двигателем, каждое из них всегда цепляется за дорогу и толкает автомобиль вперед и это уже само по себе является большим плюсом (например, на скользком подъеме).
Однако, постоянный полный привод по-настоящему хорош, только когда он оснащен системой курсовой устойчивости (ESP), которая подтормаживает нужное колесо и не дает ему забуксовать, если оно попало на более скользкую поверхность.
Недостатком постоянного полного привода является высокий расход топлива, а преимуществом – большая надежность. Что касается проходимости, то штурмовать просторы бездорожья на постоянном полном приводе можно, но лишь в том случае, если в его конструкции предусмотрены блокировки центрального и межосевых дифференциалов.
Преимущества постоянного полного привода:
- Постоянная готовность
- Высокая надежность
Недостатки постоянного полного привода:
- Повышенный расход топлива
Подключаемый вручную полный привод

Это самая старая и самая неудобная разновидность полного привода, а вот проходимость у нее, пожалуй, самая высокая. Такой авто, в обычном состоянии, имеет задний привод, а передние колеса можно подключить вручную, но для этого необходимо сделать остановку. Постоянно ездить с подключенным передним мостом, на таком автомобиле – нельзя, так как это создает нагрузки на раздаточную коробку и ускоряет износ шин. Также, недостатком этой схемы можно считать довольно большой расход топлива, независимо от того, включен полный привод или выключен.
Есть у этой разновидности полного привода и свои преимущества. Во-первых, такой привод очень хорош на бездорожье, а во-вторых, он еще и обладает очень высокой надежностью.
Плюсы подключаемого вручную полного привода:
- Высокая проходимость
Минусы подключаемого вручную полного привода:
- Неудобство включения полного привода
- Большой расход топлива
Автоматически подключаемый полный привод
Это самый современный вид полного привода и самый перспективный, но он еще не доведен до совершенства и не очень хорошо переносит серьезное бездорожье. Варианты реализации автоматически подключаемого полного привода бывают самые разные, но общий принцип такой, что одна пара колес соединена с двигателем постоянно, а вторая подключается только по необходимости. Подключение это происходит через многодисковую муфту, а управляет всем этим процессом компьютер. Таким образом, в обычном режиме автомобиль обладает приводом на одну ось, а полно-приводным становится только когда это действительно нужно.

Главными плюсами такой схемы являются экономия топлива и удобство использования. Водителю не нужно выполнять никаких действий, компьютер сам подключает вторую пару колес, когда это необходимо.
С другой стороны, многодисковая муфта намного менее надежна, чем классический полный привод. Автоматически подключаемый полный привод позволяет не замечать снежных заносов в городе и без труда взбираться на ледяной подъем, но он не предназначен для штурма серьезного бездорожья.

Плюсы автоматически подключаемого полного привода:
- Экономия топлива
- Удобство использования
Минусы автоматически подключаемого полного привода:
- Более низкая надежность
Теперь, друзья, вы знаете чем отличаются разные виды привода и сможете сделать правильный выбор. Обязательно оценивайте статью, делитесь ею с друзьями и оставляйте ваши комментарии.
Какой привод лучше? Привод автомобиля: какой выбрать?
5 (100%) 3 vote[s]kak-kupit-auto.ru