
Четыре на четыре: зачем современным машинам задние подруливающие колеса
И ладно бы только на Porsche 911 GT3 или Lamborghini Aventador — но ведь на обычном Renault Espace тоже внедряют поворачивающиеся задние колеса. В чем смысл такого технического решения, и ради чего шли на такие сложности производители? И почему о технологии забыли до недавнего времени?
Зачем нужна управляемость
Настройка управляемости всегда считалась очень сложной работой, а машины с идеальным балансом попадали в число лучших. Шасси современных машин, на первый взгляд, мало изменилось в сравнении с восьмидесятыми годами, но отличие есть. И оно отлично себя проявляет, если взглянуть на достигаемые машинами скорости на маневре «переставка» или на гоночной трассе.
Современный семейный хэтчбек способен опередить большую часть суперкаров тридцатилетней давности на автодроме, и не в последнюю очередь за счет тонкой настройки управляемости и отличной «цепкости» шасси.
Нет, речь вовсе не о школьном предмете — я про геометрию шасси. Это набор параметров, описывающих изменения в положении элементов шасси при изменении нагрузки. Суть фокуса в том, что при прохождении поворотов машина наклоняется, да и дорога имеет свой профиль. При правильном расчете параметров геометрии шасси покрышки всегда имеют оптимальный для данных условий контакт с дорогой.
Речь здесь не о максимальной прижимной силе, а о соотношении коэффициента сцепления колес передней и задней оси, правого и левого колес, и о способности колеса в каждый момент воспринимать нагрузку по трем направлениям.
Задача повысить площадь контакта колес с дорогой не так проста, как кажется.
Конечно же, можно «зажать» подвески и сделать перемещения меньше. Это полезно со многих точек зрения, и часто так и поступают, но ведь перемещения можно использовать для благого дела.
А можно задать перемещение с помощью усложненной подвески — например, многорычажной, которая позволяет настраивать геометрию движения колеса в очень широких пределах и сохранять эти параметры при износе элементов длительное время.
Если вы не гонщик, это не означает, что управляемость для вас не важна. Просто в вашем случае этот термин означает совсем иной набор предпочтительных параметров, нежели идеальная точность и быстрота реакций. Собственно, активная безопасность машины во многом зависит от ее управляемости, и потому над этими параметрами конструкторы автомобилей работают много и продуктивно. А какое отношение это имеет к геометрии шасси?
Как машина поворачивает
Казалось бы, чего проще: повернул передние колеса — и машина повернула. Но на практике все заметно сложнее.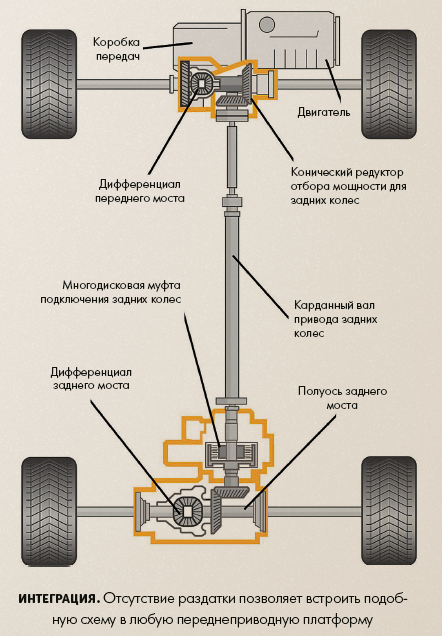 Для начала даже на стоящей машине повернутся не только передние колеса. Поскольку у передней подвески есть угол кастора, то передние колеса при повороте поднимутся, каждое на свою высоту. На сколько — зависит от ширины и твердости резины, геометрии подвески и так далее.
Для начала даже на стоящей машине повернутся не только передние колеса. Поскольку у передней подвески есть угол кастора, то передние колеса при повороте поднимутся, каждое на свою высоту. На сколько — зависит от ширины и твердости резины, геометрии подвески и так далее.
Машина в результате получит некоторый крен, в зависимости от высоты центра крена передней и задней подвесок и положения центра масс в этот момент. Задние колеса или даже неразрезной задний мост тоже повернутся — просто в силу того, что при любом изменении положения кузова колеса не просто ходят вверх-вниз, а тоже чуточку, но поворачивают.
В динамике к этой куче параметров добавятся кренящий момент от центра масс машины и уводы резины. Среди всех параметров, которые необходимо рассчитать, для нас наибольшее значение будет иметь мгновенный центр поворота и радиусы поворота передней и задней осей и центра масс. Мгновенный центр поворота совсем не совпадает с геометрическим, который вычислен по правилу Аккермана – точкой, в которой находятся центры окружностей качения всех колес.
На первый взгляд, если доворачивать задние колеса в противоположную от передних сторону, то уменьшается радиус поворота машины. Это важно с точки зрения удобства эксплуатации и маневренности. Чем меньше радиус, тем удобнее. Но машины ездят не только на скоростях погрузчиков в торговом центре, так что приходится учитывать и другие факторы.
А что если поворачивать колеса в ту же сторону, что и передние? На первый взгляд, бессмыслица: машина «поедет боком» по большому радиусу, если задние колеса повернуты на меньший угол, чем передние. Сам по себе больший радиус поворота означает, что станет меньше перераспределение нагрузок между правыми и левыми колесами, а значит лучше сцепление колес с дорогой и комфорт.
Но, кажется, того же можно добиться, просто повернув руль на меньший угол? Можно это сделать даже автоматически — благо, рулевые механизмы с переменным шагом сейчас не редкость._Trial_Cars_Page_09_Image_0001.jpg?w=600) Но при повороте задних колес в сторону поворота еще и уменьшается угол увода задней оси, а значит, и склонность к избыточной поворачиваемости. Если совсем просто – машина становится более устойчивой к возникновению заноса. На высоких скоростях это крайне важно.
Но при повороте задних колес в сторону поворота еще и уменьшается угол увода задней оси, а значит, и склонность к избыточной поворачиваемости. Если совсем просто – машина становится более устойчивой к возникновению заноса. На высоких скоростях это крайне важно.
Схожий эффект можно было бы получить простым увеличением колесной базы. Но размеры машин ограничены — зато с помощью изменения угла поворота задних колес можно получить желаемое, не увеличивая габаритов. А для короткобазной машины это просто спасение: можно сохранить сочетание устойчивости на дороге, характерное для больших машин, не отказываясь от хорошей поворачиваемости.
Не только управлением
Для устойчивости на дороге заднее колесо в повороте должно поворачиваться в сторону поворота передних, а для лучшей маневренности – в противоположную. Если с маневренностью особых сложностей нет, то можно использовать для доворота колес особенности движения машины в повороте. Например, наличие крена. При сжатии подвеска будет доворачивать колесо, и мы получим желаемое.
Но тут есть две проблемы. Во-первых, подвеска таким же образом реагирует на изменение нагрузки, а хотелось бы, чтобы управляемость меньше зависела от нагрузки и больше от собственно крена и боковых усилий. Во-вторых, на заднеприводных машинах очень соблазнительно привязать поворот колес к вектору тяги.
Если усложнять подвеску, вводя рычаги, которые воздействуют на углы установки колес при определенной нагрузке, то мы получим многорычажную подвеску. Да, ту самую, которая появилась на Mercedes W201 и сейчас применяется на большинстве машин С-класса и выше. Причем не только на задней оси, но и на передней.
Именно многорычажная подвеска позволила получить тот же эффект, что и принудительный поворот задней оси, и отказаться от применения сложных систем принудительного поворота на четверть века. Система рычагов в такой подвеске задает сложную траекторию движения колеса в зависимости от продольной, поперечной и вертикальной нагрузок.
Можно довольно точно настроить геометрию шасси с учетом того, как машина будет вести себя при появлении значительных боковых сил, при разном соотношении вертикальной и поперечной нагрузок.
Первые полноуправляемые легковушки
Машины с двумя управляемыми осями создавали вовсе не для отличной управляемости. Такие машины вообще не ездили по шоссе на большой скорости, потому что это были вездеходы. Например, знаменитый Unimog – универсальное шасси повышенной проходимости имеет все четыре управляемых колеса. Разумеется, для того, чтобы лучше ехать по бездорожью и маневрировать в ограниченном пространстве.
На фото: Mercedes-Benz Unimog U 1000Японские машины начала 80-х годов по сложности конструкции недалеко от них ушли. На Honda Prelude 1987 года была задняя рулевая рейка и вал, связывающий ее с рулевым колесом, и система работала в зависимости от угла поворота колес. На малых углах поворота задние колеса поворачивались в ту же сторону, что и передние, а при больших — в противоположную.
Только на следующих поколениях привод задней рулевой рейки стал уже электрическим, а угол поворота зависел и от скорости, на которой совершался маневр. Впрочем, от валов и рейки избавиться не догадались. Конструкции оставались сложными, массивными, объемными и дорогими. Как итог — машины с ними не снискали особой популярности и продавались только на внутреннем японском рынке. Во всем остальном мире безоговорочное лидерство захватили многорычажные подвески.
Почему снова появляются полноуправляемые шасси
Самый очевидный ответ на этот вопрос — снижение цены на приводные механизмы и электронику управления и развитие систем устойчивости и безопасности. На новом технологическом уровне отказались от задних рулевых трапеций и реек. Многорычажные подвески обеспечивают уже достаточный угол доворота колес для реализации нужного эффекта.
Электроника куда точнее определяет, что происходит в данный момент с машиной, позволяет использовать большие углы доворота, и к тому же дешевле в настройке, чем сложная подвеска. И как дополнительный фактор – то самое улучшение поворачиваемости на малых скоростях. Можно довернуть колеса в противоположную сторону и улучшить маневренность машины на узких улочках.
Не удивлюсь, если подобные системы в ближайшее время будут массово внедряться на машинах от С-класса и выше, причем в сочетании с упрощенной геометрией задней подвески — например, не с многорычажками, а со скручиваемой балкой. Экономический смысл в этом определенно есть, ведь можно получить управляемость, как у более дорогих машин, при меньших затратах. Да и еще один сложный и дорогой изнашиваемый узел «лишним» не будет. Ведь производители авто, кажется, взяли обязательство сделать машину одноразовой.
Автомобили с передними управляемыми колесами
Углы установки передних колес автомобиля. Передние управляемые колеса автомобиля при любой конструкции моста и подвески устанавливают с определенными углами наклона в вертикальной и горизонтальной плоскостях для создания наимень- [c.210]Передний мост автомобиля служит для установки передних управляемых колес. Он передает от колес на кузов или раму автомобиля вертикальные, продольные и поперечные силы, возникающие при движении автомобиля по дороге. [c.96]
Повышенный -или односторонний износ покрышек возникает при эксплуатации автомобиля с давлением воздуха в шинах, не соответствующим установленным нормам. Кроме того, односторонний износ, как правило, вызывается неправильной установкой передних управляемых колес. При пониженном давлении воздуха возникает повреждение каркаса шины.
 [c.110]
[c.110]Парковка перпендикулярно проезжей части аналогична заезду в гараж. Парковка под углом к проезжей части не представляет сложности, если вы справляетесь в перпендикулярной парковкой. Остановимся на парковке автомобиля параллельно проезжей части. Если между стоящими у тротуара автомобилями места для вашего автомобиля хватает, но ограничено, то целесообразно заезжать в этот промежуток задним ходом. Дело в том, что с помощью передних управляемых колес нос автомобиля легко заносится. [c.31]
Установка направляющих колес. Передние управляемые колеса для повышения устойчивости при прямолинейном движении автомобиля, легкости возвращения в исходное положение при отклонении колес в сторону, облегчения управления и уменьшения износа шин требуют специальной установки. [c.271]
Во время движения автомобиля его передние управляемые колеса могут совместно с передней осью колебаться в вертикальной плоскости (рис. 329, а), а вокруг
[c.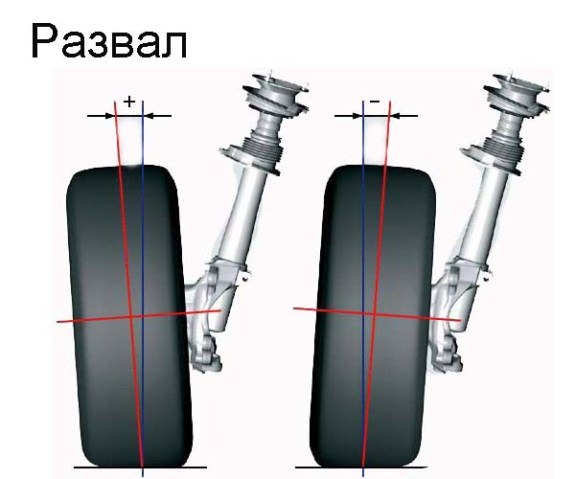 613]
613]
На рис. 152, а дана схема движения автомобиля по окружности при повернутых передних управляемых колесах. Это движение происходит вокруг центра поворота О, расположенного в точке пересечения оси задних колес и осей обоих управляемых колес. Все колеса катятся по дугам концентричных окружностей без бокового скольжения. Управляемые колеса повернуты на различные углы, причем угол 0в поворота внутреннего по отношению к центру поворота колеса больше угла 9н поворота внешнего колеса. [c.228]
Если передние управляемые колеса легкового автомобиля ведущие, то их привод осуществляется карданными передачами, имеющими обычно два карданных шарнира У и 7 равных угловых скоростей и вал 4 (рис. 117, а). Долговечность карданных шарниров в значи- [c.153]
На рис. 77 показаны передние управляемые колеса автомобиля, испытывающие боковой увод и находящиеся под действием тангенциальных реакций Х1 и Хг» и боковых реакций и Ух». Под влиянием бокового увода отпечатки шин на дороге смещены в сторону действия боковых реакций и повернуты на угол 5 относительно плоскостей вращения колес. Вследствие этого даже при равенстве реакций Х == Х1″ их моменты относительно осей шкворней не будут равны, так как к >/2. Таким образом, момент на внутреннем колесе 1 будет больше момента на внешнем колесе 2.
[c.131]
Вследствие этого даже при равенстве реакций Х == Х1″ их моменты относительно осей шкворней не будут равны, так как к >/2. Таким образом, момент на внутреннем колесе 1 будет больше момента на внешнем колесе 2.
[c.131]
Рулевой привод передает усилие от рулевой сошки к передним управляемым колесам и располагается сзади оси передних колес. Он состоит из рулевой сошки 5, соединенной со средней рулевой тягой 6, маятникового рычага 7, боковых тяг и рычагов 1 и 11 поворотных стоек цапф передних колес (рис. 82). При повороте рулевого колеса вместе с ним поворачивается рулевой вал с червяком, который через двойной ролик поворачивает вал рулевой сошки, а рулевая сошка перемещает среднюю тягу 6 и через нее — маятниковый рычаг 7 и боковые тяги, осуществляя поворот левого и правого колес. Каждая боковая рулевая тяга состоит из внутреннего 4 и наружного 2 наконечников, соединяемых между собой регулировочной резьбовой муфтой 3, имеющей с одной стороны левую, а с другой — правую резьбу.
 Такое устройство позволяет изменять общую длину тяг рулевой трапеции при регулировке величины схождения колес. В отрегулированном положении муфты закрепляются контргайками ( Москвич-412 ) или стяжными хомутами (ВАЗ-2101). Шарниры рулевых тяг на ВАЗ-2101 неразборные и заполняются смазкой при сборке на весь период эксплуатации. На автомобиле Москвич-412 в шарнирах рулевых тяг устанавливаются пластмассовые вкладыши, не требующие смазки.
[c.122]
Такое устройство позволяет изменять общую длину тяг рулевой трапеции при регулировке величины схождения колес. В отрегулированном положении муфты закрепляются контргайками ( Москвич-412 ) или стяжными хомутами (ВАЗ-2101). Шарниры рулевых тяг на ВАЗ-2101 неразборные и заполняются смазкой при сборке на весь период эксплуатации. На автомобиле Москвич-412 в шарнирах рулевых тяг устанавливаются пластмассовые вкладыши, не требующие смазки.
[c.122]Нарушение углов установки передних (управляемых) колес в процессе эксплуатации затрудняет управление автомобилем, вызывает повышенный или односторонний износ шин, износ подшипников колес, шкворней и их втулок, а также перерасход топлива, ухудшает устойчивость автомобиля при прямолинейном движении. [c.207]
Управляют плавающим автомобилем путем поворота передних управляемых колес и лодочного руля, расположенного в задней части кузова. [c.252]
Передние (управляемые) колеса автомобиля имеют четыре установочных угла развала, схождения управляемых колес, поперечного и продольного наклона шкворня. [c.158]
[c.158]
Неисправность ходовой части автомобиля. Шины подвергаются повреждениям в эксплуатации в результате следующих основных неисправностей ходовой части автомобиля неправильных углов установки передних (управляемых) колес, большого люфта в рулевом управлении и погнутости деталей рулевых тяг, ослабления рессор (пружин), прогиба или перекоса передней оси, течи масла, наличия резко выступающих деталей рессор и кузова, провисания крыльев, непараллельности осей и др. [c.109]
Установка направляющих колес. Передние управляемые колеса для повышения устойчивости и стабилиза ции при прямолинейном движении автомобиля, облегчения управления и уменьшения износа шин требуют специальной установки. [c.251]
Указанные неисправности ходовой части возникают вследствие увода автомобиля вправо или влево от прямолинейного движения, виляния передних управляемых колес при большой скорости движения, наклона автомобиля в одну сторону, раскачивания и стука в области подвесок при движении. [c.75]
[c.75]
При ТО-2 выполняют регулировочные работы, связанные с установкой и креплением передних управляемых колес и задних колес на грузовых автомобилях. [c.76]
Существенные отличия имеет трансмиссия переднеприводного автомобиля ВАЗ-2108 с колесной формулой 4X2 (рис. 16.1,6). Особенностью этой схемы является выполнение ведущим переднего моста с управляемыми колесами. Это потребовало объединения в единый силовой агрегат двигателя I, сцепления 2, коробки передач 3, механизмов ведущего моста 5 (главную передачу и дифференциал), карданных шарниров 6 равных угловых скоростей, соединенных с передними управляемыми колесами. [c.177]
Передний неведущий мост. Передний неведущий мост грузовых автомобилей служит для установки передних управляемых колес. Он передает от колес через подвеску на раму автомобиля продольные и боковые силы, возникающие от контакта автомобиля с дорогой. [c.208]
Рулевое управление служит для изменения направления движения автомобиля поворотом передних управляемых колес.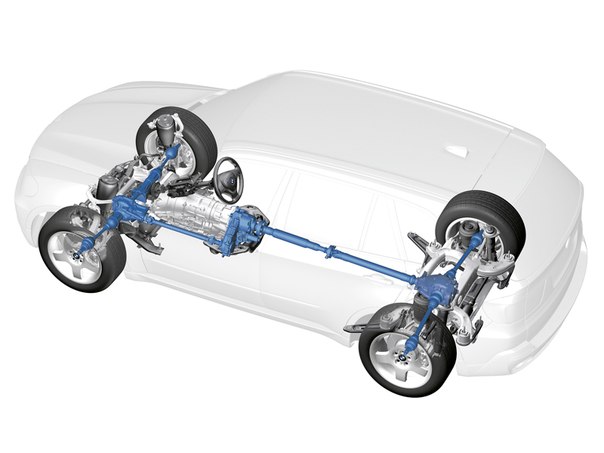 Оно состоит из рулевого механизма и рулевого привода. На грузовых автомобилях большой грузоподъемности в рулевом управлении применяют усилитель, который облегчает управление автомобилем, уменьшает толчки на рулевое колесо и повышает безопасность движения.
[c.225]
Оно состоит из рулевого механизма и рулевого привода. На грузовых автомобилях большой грузоподъемности в рулевом управлении применяют усилитель, который облегчает управление автомобилем, уменьшает толчки на рулевое колесо и повышает безопасность движения.
[c.225]
Чтобы совершить поворот без бокового скольжения колес, все они должны катиться по дугам разной длины, описанным из центра поворота О (рис. 18.1). При этом передние управляемые колеса должны поворачиваться на разные углы. Внутреннее по отношению к центру поворота колесо должно поворачиваться на угол Ов, наружное — на меньший угол а . Это обеспечивается соединением тяг и рычагов рулевого привода в форме трапеции. Основанием трапеции служит балка / переднего моста автомобиля, боковыми сторонами являются левый -4 и правый 2 поворотные рычаги, а вершину трапеции образует поперечная тяга 3, которая соединяется с рычагами шарнирно. К рычагам 4 и 2 жестко присоединены поворотные цапфы 5 колес.
[c. 226]
226]
Типовые схемы рулевого привода автомобиля с одной парой передних управляемых колес приведены на рис. XVI.9 схема а относится к автомобилям с зависимой подвеской, а схема б — к автомобилям с независимой подвеской. [c.438]
Когда же автомобиль двинется назад, то положение изменится. Теперь надо помнить, что по наименьшему радиусу катится колесо в (см. рис. 106). Переднее управляемое колесо а будет двигаться по кривой большего радиуса. Значит, если на дуге 4—4 будет находиться препятствие и водитель не учтет того, что передние управляемые колеса при движении задним ходом катятся по большим радиусам, чем задние, то может случиться, что колесо г пройдет возле препятствия, а переднее колесо б заденет за него. [c.159]
Основным отличием рулевого привода автомобиля ГАЗ-24, имеющего независимую подвеску передних управляемых колес, является то, что у него поперечная рулевая тяга состоит из трех [c.68]
Основным отличием рулевого привода автомобиля ГАЗ-24, имеющего независимую подвеску передних управляемых колес, является то, что у него поперечная рулевая тяга состоит из трех частей двух боковых и одной средней тяги, соединенных шарнирами.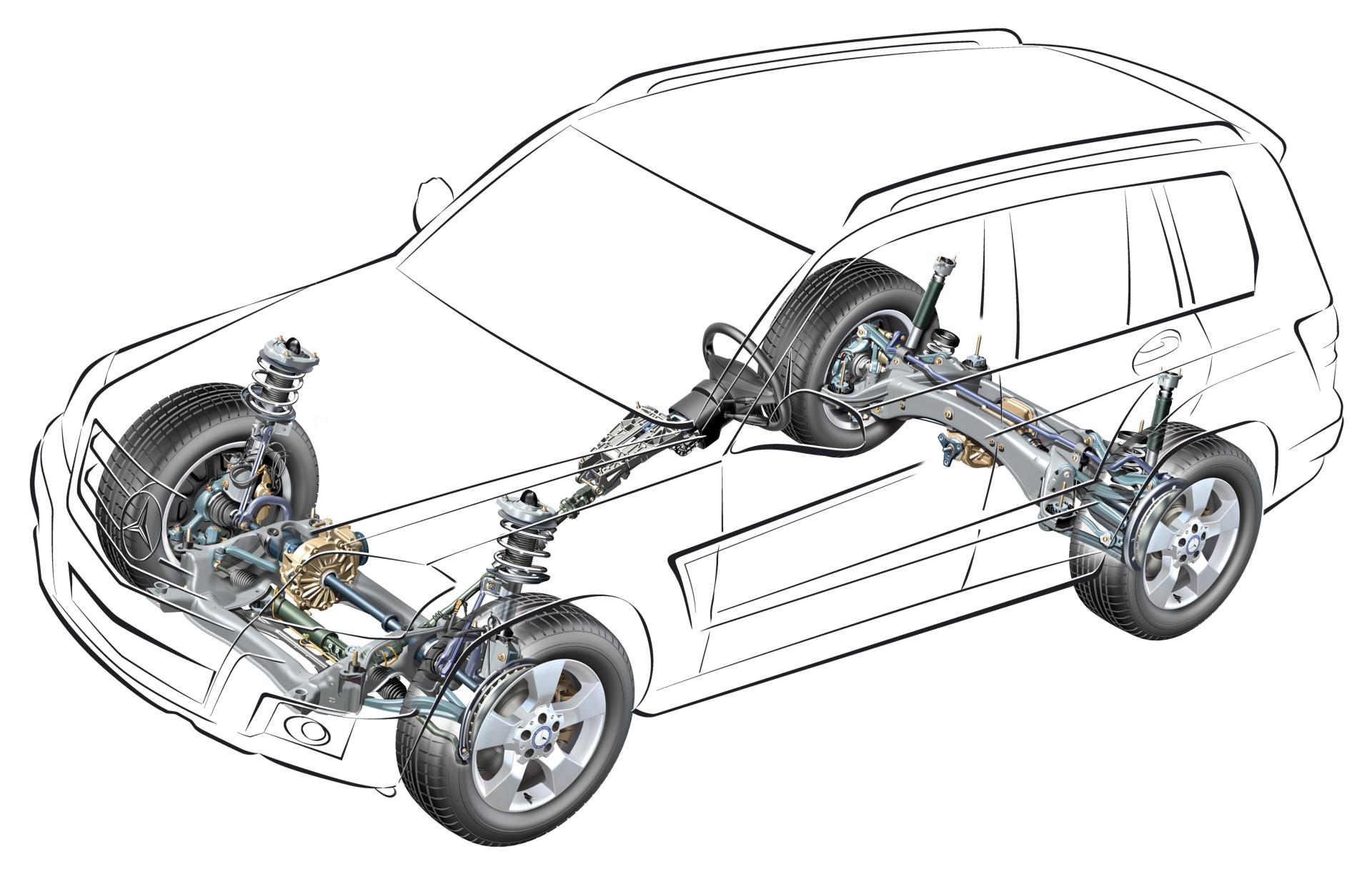 Боковые тяги состоят из двух частей, соединенных трубками с внутренней резьбой, позволяющей изменять длину тяг, регулируя схождения колес.
[c.88]
Боковые тяги состоят из двух частей, соединенных трубками с внутренней резьбой, позволяющей изменять длину тяг, регулируя схождения колес.
[c.88]
При независимой подвеске колес перемещение одного колеса, вызванное неровностями дороги, не вызывает перемещения другого, так как каждое колесо подвешено к раме или основанию кузова автомобиля самостоятельно. Такая подвеска имеет следующие преимущества уменьшается склонность передних управляемых колес автомобиля к колебаниям вокруг шкворней и наклоны кузова при наезде колеса на препятствие [c.175]
Установка шкворней поворотных цапф и передних колес. Под стабилизацией управляемых колес понимают возвращение их в нейтральное положение, если они были выведены из этого положения под влиянием случайной силы или при повороте рулевого колеса. На средних и повышенных скоростях движения автомобиля стабилизация управляемых колес обеспечивается продольным наклоном шкворней (наклоном их верхней части назад) и боковой эластичностью шин. [c.141]
[c.141]
Управляемость и устойчивость автомобиля. Способность управляемых колес сохранять положение, соответствующее прямолинейному движению автомобиля, и автоматически в него возвращаться после изменения направления движения колес называется стабилизацией. Эта способность колес обеспечивается конструктивными особенностями автомобиля наклоном шкворня в продольном и поперечном направлениях относительно оси переднего моста (балки) и трением в рулевом механизме. [c.184]
По типу направляющего устройства подвески разделяются на зависимые и независимые. Независимые подвески получили широкое распространение на передних управляемых колесах легковых автомобилей, обеспечивая лучшую плавность хода. Подавляющее большинство автомобилей имеют подвеску с металлическими упругими элементами, главным образом рессорную и пружинную. [c.190]
Схема движения автомобиля на повороте показана на рис. 282. Передние управляемые колеса повернуты на угол 0 от нейтрального положения. Толкающую силу Р.,, приложенную к оси каждого из передних ведомых колес, можно разложить на составляющие Р = = Рт os 0 j и Pj, = Pj sin Эц, направленные в плоскости повернутого колеса и перпендикулярно ей.
[c.432]
Толкающую силу Р.,, приложенную к оси каждого из передних ведомых колес, можно разложить на составляющие Р = = Рт os 0 j и Pj, = Pj sin Эц, направленные в плоскости повернутого колеса и перпендикулярно ей.
[c.432]
| Рис. 77. Привод передних управляемых колес автомобиля ВАЗ-2121 Нива |
Передние управляемые колеса автомобилей при любой конструкции переднего моста и подвески устанавливают с определенным наклоном в вертикальной и горизонтальной плоскостях для создания наименьшего сопротивления движению, уменьшения износа шин и снижения расхода топлива.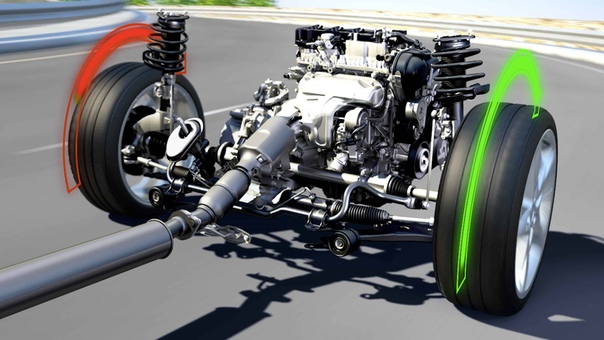 Такая установка передних колес характеризуется углом развала и углом схоледения.
[c.97]
Такая установка передних колес характеризуется углом развала и углом схоледения.
[c.97]
Из рис. 327 видно, что действительный радиус поворота / 1 и теоретический Я не равны лмежду собой. Величина действительного радиуса поворота зависит не только от угла поворота передних управляемых колес автомобиля, но и от соотношения между углами увода задней и передней осей. [c.610]
Шины, ведуших колес грузовых автомобилей изнашиваются быстрее шин ведомых колес. По опытным данным, если принять пробег шин ведуших колес за 100%, пробег шин ведомых колес составляет более 150%. В горных условиях наблюдается усиленный износ шин передних управляемых колес. [c.204]
При сочленении секций автомобиля со свободой перемещения вокруг продольной и вертикальной осей (типа Гоуэр ) угол поворота вокруг вертикальной оси должен быть достаточно больщим, чтобы обеспечивался поворот автомобиля без управляемых колес складыванием секций в горизонтальной плоскости. Преимущество такой схемы по сравнению с предыдущей — широкое межколесное пространство в передней части, которое можно рационально использовать для размещения силовой установки, кабины и основных элементов трансмиссии и высвободить практически всю заднюю секцию под полезный для перевозки груза объем. Автомобили с подобной схемой сочленения, как правило, тихоходные, иногда не имеют подвесок.
[c.73]
Преимущество такой схемы по сравнению с предыдущей — широкое межколесное пространство в передней части, которое можно рационально использовать для размещения силовой установки, кабины и основных элементов трансмиссии и высвободить практически всю заднюю секцию под полезный для перевозки груза объем. Автомобили с подобной схемой сочленения, как правило, тихоходные, иногда не имеют подвесок.
[c.73]
У автомобилей с независимой псдвеской передних управляемых колес (ГАЗ-21 Волга , Москвич и др.) регулируют схол[c.207]
Колесный движР1тель предназначен для обеспечения движения автомобиля и управления им и состоит из ведущих и ведомых колес. Конструкция колесного движителя всех модификаций автомобилей КамАЗ типа 6X4 аналогична и состоит из двух одинарных передних управляемых колес и четырех сдвоенных задних ведущих колес (колесная формула 6X4). [c.243]
В конструкциях двухосных прицепов с низко расположенной рамой вместо поворотной тележки применяют привод передних управляемых колес по аналогии с рулевым приводом колес автомобиля.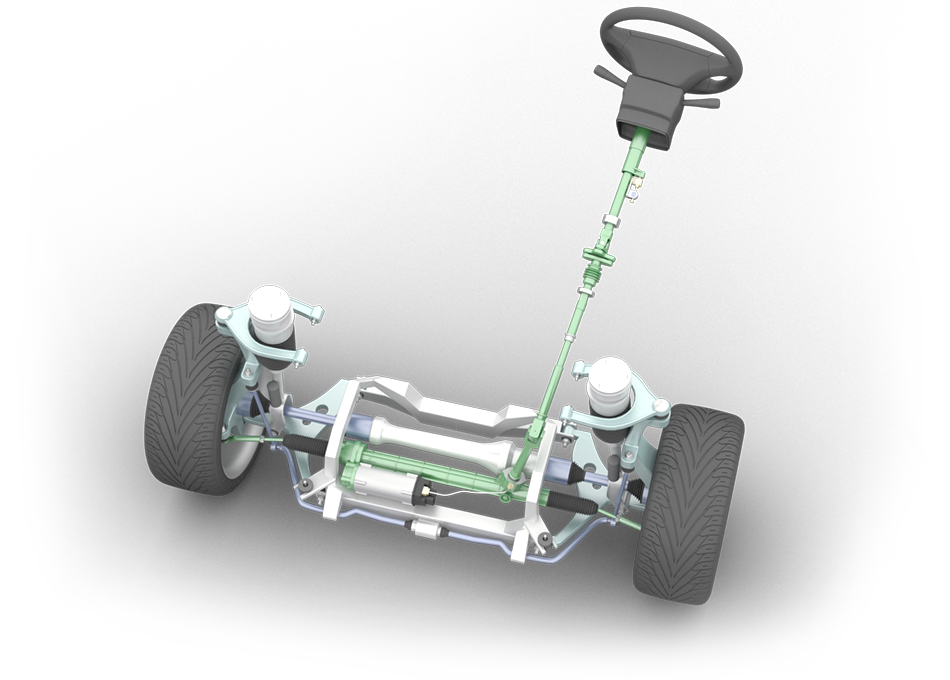 Такие прицепы имеют полную унификацию с передней осью автомобиля-тягача (например, прицеп МАЗ-5207В).
[c.276]
Такие прицепы имеют полную унификацию с передней осью автомобиля-тягача (например, прицеп МАЗ-5207В).
[c.276]
Кроме того, проверяется регулировка и затяжка подшипников колес проверяется и при необходимости регулируется схождение передних управляемых колес, люфт в подшипниках шкворней новоротных цапф. У автомобилей КрАЗ-257 и Урал-375 проверяется надежность крепления балансиров задней подвески на оси и кронштейнов реактивных штанг к поперечине ра.мы. [c.206]
Задние поворотные колеса на Porsche 911 GT3
Заднее рулевое управление.
Идея сделать задние колеса управляемыми является хорошо забытым старым. На самом деле сделать управляемыми задние колеса зародилась еще во времена деревянных повозок (так называемые безлошадные повозки). Но компания Porsche в своей новой модели 911 GT3 решила вспомнить старую идею и, используя современные технологии, оснастить свою новинку управляемыми задними колесами.
Почему в старые времена на повозках делали управляемые задние колеса? Как правило, большинство повозок использовались в сельской местности для сельского хозяйства, где актуальность ограниченного разворота или поворота, как никогда очень важна. В новом уникальном спорткаре Porsche 911 GT3 система управляемых задних колес представляет собой уникальные разработки Немецкой компании.
В новом уникальном спорткаре Porsche 911 GT3 система управляемых задних колес представляет собой уникальные разработки Немецкой компании.
С момента появления официальной информации о новинке, не утихали споры о том, как компания Порше реализовала систему управления задних колес, так как подробного релиза о системе не было представлено. Сегодня наше интернет издание 1ГАИ.РУ предлагает Вам два подробных видео ролика, из которых Вы узнаете, как поворачивают вместе с передними, задние колеса, которые помогают спортивному автомобилю не только с легкостью проходить повороты, но и увеличивают динамику при разгоне.
В целом идея оснастить автомобиль Порше задними управляемыми колесами это отличное решение для спорткара. Было бы глупо, если подобная система появилась бы на традиционных городских автомобилях. Конечно, новая технология имеет большую сложность в конструкции, из-за чего вырастает риск сложного ремонта в случае поломки, но для тех, кто покупает подобные автомобили, мы думаем, что для них главное непередаваемые ощущения, которые может дать этот мощный спорткар, чем технические сложности конструкции.
Видео
Справка 1ГАИ.РУ: Система управления колесами задней оси Porsche — это электромеханическая система регулирования задних колес. Данная система позволяет автомобилю проходить повороты любой сложности под разным углом.
На небольших скоростях задние колеса регулируются не синхронно с передними, чтобы обеспечить устойчивое прохождение поворотов. При большой скорости, как передние, так и задние колеса поворачиваются синхронно. Благодаря своеобразному изменению на короткое время размера колесной базы, автомашина, оборудованная данной системой более динамична и устойчива на дороге. Во время спортивных соревнований система управления задними колесами позволяет с преимуществом обходить соперников на поворотах.
Во время спортивных соревнований система управления задними колесами позволяет с преимуществом обходить соперников на поворотах.
Смешно о Porsche
Почему заводские гонщики Порше не умеют параллельно парковаться
БГАК — Учебные материалы — Д.В.Фокин — Современные автомобильные технологии — Теория — Рулевое управление
Рулевое управление с двумя управляемыми осями
Устойчивость
и управляемость автомобиля при поворотах во многом зависит от направления следования
задней оси по колее передней, которое необходимо для уменьшения угла поворота автомобиля
и износа его шин. Применение управляемой задней оси позволяет уменьшать поперечные
ускорения при повороте автомобиля, что повышает его устойчивость. Системы управления
всеми четырьмя колесами значительно улучшают маневрирование автомобиля. Во-первых,
повышается чувствительность автомобиля к повороту рулевого колеса. Ведь при тихой
езде по городским улочкам лучше иметь «острое» рулевое управление, чтобы не вращать
рулевое колесо на несколько оборотов при каждом маневре. На автостраде же
«острое» рулевое управление может вызвать проблемы — автомобиль будет слишком резко
реагировать даже на небольшие подруливания. Во-вторых, улучшается маневрирование
автомобиля при парковке или развороте в стесненных городских условиях, т.е. уменьшается
радиус поворота. И в-третьих, повышается курсовая устойчивость при резких маневрах
на высокой скорости.
Ведь при тихой
езде по городским улочкам лучше иметь «острое» рулевое управление, чтобы не вращать
рулевое колесо на несколько оборотов при каждом маневре. На автостраде же
«острое» рулевое управление может вызвать проблемы — автомобиль будет слишком резко
реагировать даже на небольшие подруливания. Во-вторых, улучшается маневрирование
автомобиля при парковке или развороте в стесненных городских условиях, т.е. уменьшается
радиус поворота. И в-третьих, повышается курсовая устойчивость при резких маневрах
на высокой скорости.
Рулевое управление всеми колесами может работать в одном из двух режимов: с поворотом колес передней и задней осей в разные стороны или в одну и ту же сторону.
При
малых скоростях, примерно до 40 км/ч, задние колёса автоматически
поворачиваются в противоположную сторону относительно передних колёс
(рис.5.1.44, а). Преимущества рулевого управления всеми колёсами особенно
заметны при маневрировании. Диаметр разворота уменьшается примерно на один
метр: с 12 до 11 м.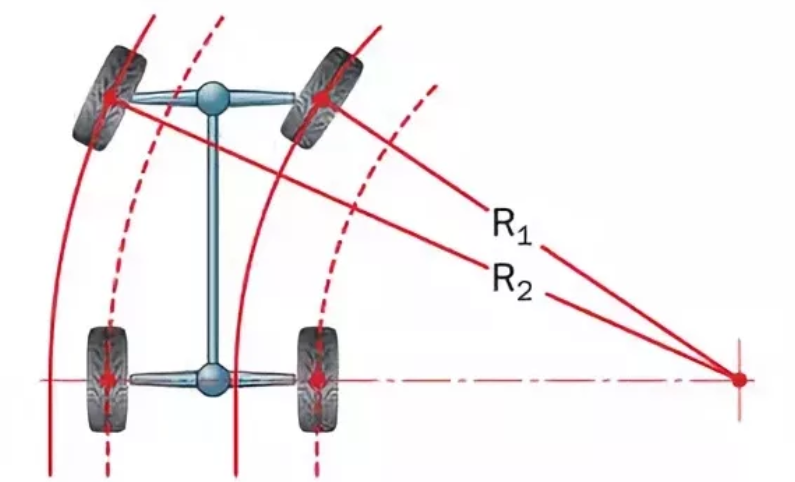 За счёт этого улучшаются манёвренные качества автомобиля.
За счёт этого улучшаются манёвренные качества автомобиля.
Если скорость становится выше 40 км/ч, то задние колёса при повороте рулевого колеса автоматически поворачиваются в ту же сторону, что и передние (рис.5.1.44, б). За счёт этого улучшается устойчивость, а, следовательно, и безопасность движения.
Рисунок 5.1.44 – Режимы работы рулевого управления
1. Поворот передних и задних колес в разные стороны (рис.5.1.45)
Рисунок 5.1.45 – Схема движения автомобиля на повороте
Главное
преимущество поворота передних и задних колёс в разные стороны заключается в
улучшении манёвренности автомобиля при малых скоростях, а также в уменьшении
коридора движения автомобиля. Для водителя это выражается в том, что он может
поворачивать рулевое колесо на меньший угол при том же радиусе поворота и той
же скорости. Автомобиль в движении воспринимается как намного более манёвренный
и отзывчивый. Для полного использования преимуществ поворота колёс в разные
стороны эта функция активируется только в нижнем диапазоне скоростей (до прим.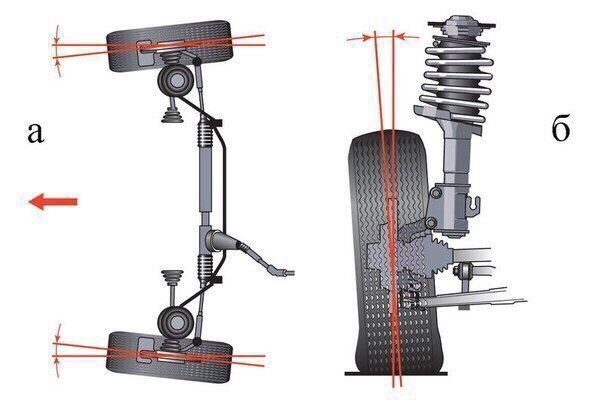 40 км/ч).
40 км/ч).
На рисунке 5.1.45 преимущество управляемой задней подвески показано на примере разворота с минимальным радиусом. Хорошо видно, что радиус разворота R2, достигаемый при использовании управляемой задней подвески, заметно меньше, чем в обычном случае (R1).
2. Поворот колес в одну сторону
2.1. Изменение направления движения автомобиля с управляемыми передними колесами
Водитель инициирует поворот автомобиля — для изменения направления его движения — вращением рулевого колеса, поворачивая тем самым передние колёса автомобиля (рис.5.1.46, а). Вследствие деформации пятна контакта шин (возникающей из-за поворота колёс), передние колёса начинают передавать на кузов боковые усилия.
Чтобы автомобиль мог начать поворачиваться относительно вертикальной оси, на колёсах задней оси должно возникнуть соответствующее противонаправленное боковое усилие реакции.
Вслед
за этим боковое усилие изменит своё направление под воздействием стремящейся к
наружной стороне поворота массы автомобиля, и только после этого может начать
создаваться поперечное ускорение (рис. 5.1.46, б).
5.1.46, б).
Рисунок 5.1.46 – Поворот автомобиля с управляемыми передними колесами
Изменение направления движения автомобиля поворотом только передних колёс приводит к возникновению довольно большого момента рыскания (вращательного движения относительно вертикальной оси) до тех пор, пока автомобиль не перейдёт снова в стационарное состояние движения. Следствием этого может быть снижение уровня комфорта вплоть до возникновения нестабильных состояний. Например, резкий поворот водителем рулевого колеса для объезда неожиданно появившегося препятствия может привести к возникновению вращательных колебаний относительно вертикальной оси, которые могут негативно влиять на курсовую устойчивость автомобиля.
2.2. Изменение направления движения автомобиля с управляемой задней осью
Водитель
инициирует поворот автомобиля — для изменения направления его движения —
вращением рулевого колеса, поворачивая тем самым передние колёса автомобиля
(рис. 5.1.47, а). Система реагирует на действия водителя, одновременно
поворачивая задние колёса в том же направлении. Вследствие деформации пятна
контакта шин всех четырёх колёс, параллельно боковым усилиям со стороны
передних колёс на кузов будут передаваться действующие в том же направлении
боковые усилия со стороны задних колёс. В результате возникающий момент
рыскания, то есть момент поворота относительно вертикальной оси, оказывается
существенно меньше, чем на автомобиле с управляемыми передними колёсами. Так
как боковые усилия одновременно действуют на колёса обеих осей, период перехода
от поворота рулевого колеса к установлению стационарного состояния автомобиля
ощутимо сокращается по сравнению с автомобилем, у которого управляются только
передние колёса. Изменение направления движения выполняется намного более
плавно и комфортно, а также уменьшается вероятность рыскания (возникновения
вращательных колебаний относительно вертикальной оси).
5.1.47, а). Система реагирует на действия водителя, одновременно
поворачивая задние колёса в том же направлении. Вследствие деформации пятна
контакта шин всех четырёх колёс, параллельно боковым усилиям со стороны
передних колёс на кузов будут передаваться действующие в том же направлении
боковые усилия со стороны задних колёс. В результате возникающий момент
рыскания, то есть момент поворота относительно вертикальной оси, оказывается
существенно меньше, чем на автомобиле с управляемыми передними колёсами. Так
как боковые усилия одновременно действуют на колёса обеих осей, период перехода
от поворота рулевого колеса к установлению стационарного состояния автомобиля
ощутимо сокращается по сравнению с автомобилем, у которого управляются только
передние колёса. Изменение направления движения выполняется намного более
плавно и комфортно, а также уменьшается вероятность рыскания (возникновения
вращательных колебаний относительно вертикальной оси).
Рисунок 5.1.47 – Поворот автомобиля с управляемой задней осью
Стационарное
состояние достигнуто, автомобиль движется по заданной водителем окружности
(рис. 5.1.47,б).
5.1.47,б).
В то время как поворот задних колёс в противоположном направлении используется при небольших скоростях движения, поворот задних колёс в том же направлении, что и передних, выполняется при более высоких скоростях.
Помимо уже названных преимуществ, такая схема ограничивает скорость поворота относительно вертикальной оси, возникающую при маневрировании для объезда внезапно появившегося препятствия. В таких ситуациях задние колёса поворачиваются в том же направлении, что и передние, в большей степени, чем обычно, для повышения курсовой устойчивости автомобиля.
Преимущества рулевого управления всеми колесами при неожиданных маневрах объезда препятствий изображены на рисунке 5.1.48.
Если
при скоростях выше 40 км/ч на дороге неожиданно обнаруживаются препятствия и
водителю приходится уклоняться, то возникают опасные дорожные ситуации. В
автомобилях без рулевого управления всеми колёсами задние колёса не могут
следовать за углом поворота передних колёс (рис. 5.1.48, а).
5.1.48, а).
Рисунок 5.1.48 (а) – Схема движения автомобиля при резкой смене полосы движения: маневр объезда/ смена полосы движения автомобиля с обычным рулевым управлением
В автомобилях с рулевым управлением всеми колёсами задние колёса поворачиваются однонаправленно с передними колёсами. Манёвр объезда происходит более плавно, опасные дорожные ситуации предотвращаются (рис.5.1.48, б).
Рисунок 5.1.48 (б) – Схема движения автомобиля при резкой смене полосы движения: маневр объезда/ смена полосы движения автомобиля с рулевым управлением всеми колесами
Поворот
колёс задней оси (изменение угла их схождения) осуществляется активным
исполнительным механизмом. Направляющие тяги крепятся к корпусам колёсных
подшипников через резинометаллические сайлент‑блоки, как и на обычной
задней подвеске. Но, в отличие от обычной задней подвески, направляющие тяги
другими своими концами крепятся (также через резинометаллические сайлент-блоки)
с обеих сторон не к подрамнику, а к исполнительному механизму.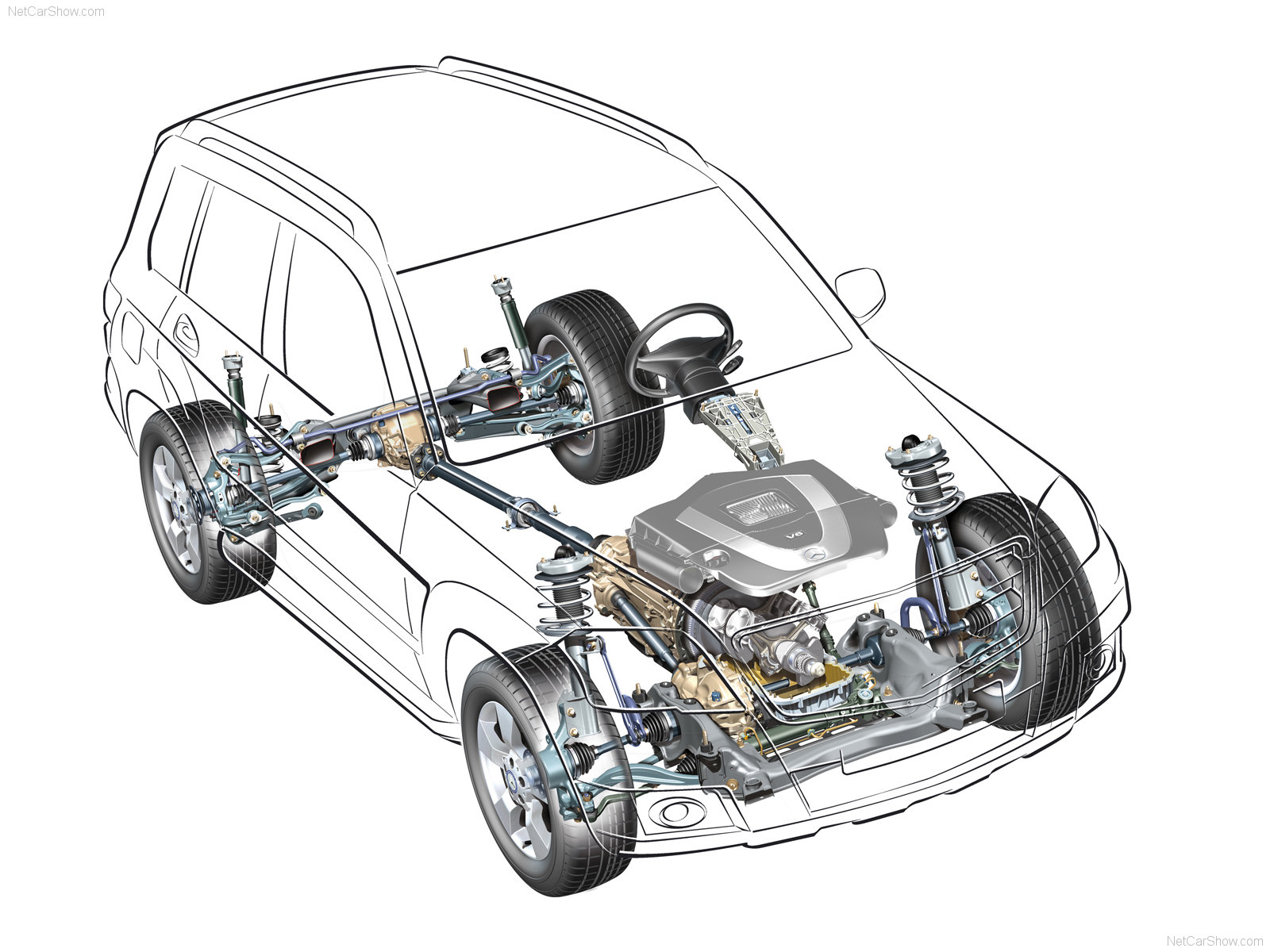
Весь узел, состоящий из исполнительного механизма, привода и электронного блока управления, установлен на подрамнике и синхронно поворачивает оба колеса на один и тот же угол. Поскольку угол поворота не превышает прим. 5°, специальные поворотные кулаки, как в подвеске передних колёс, не требуются. Изменение углов поворота колёс обеспечивается за счёт эластичности сайлент-блоков в соединениях рычагов подвески с подрамником.
Рулевое управление всеми колесами состоит из следующих компонентов (рис.5.1.49):
— блок управления управляемой задней оси J1019;
— электродвигатель;
— привод с винтовой передачей.
Рисунок 5.1.49 – Исполнительный механизм поворота колес задней оси
Электродвигатель
приводит во вращение гайку ходового винта через ремённую передачу. Вращение
гайки преобразуется в прямолинейное движение ходового винта. Закреплённые на
нём направляющие тяги передают это движение на корпуса ступичных подшипников,
приводя к одновременному повороту колёс в одну и ту же сторону: вправо или
влево (в зависимости от направления вращения электродвигателя). Благодаря шагу
и трапециевидному типу резьбы гайки/ходового винта, механизм является
самостопорящимся.
Благодаря шагу
и трапециевидному типу резьбы гайки/ходового винта, механизм является
самостопорящимся.
Напряжение на электродвигатель подаётся только непосредственно во время поворота колёс, в остальное время электродвигатель не приводится в действие. Удерживающие усилия возникают исключительно за счёт самостопорящихся свойств винтовой передачи.
Максимальный ход винта (из среднего положения) составляет прим. 9 мм, что соответствует максимальному углу поворота колёс прим. 5°.
Датчик
нулевого положения рулевого механизма (рис.5.1.50) регистрирует нулевое,
«среднее» положение ходового винта, то есть такое, при котором поворот колёс отсутствует.
Датчик работает на основе эффекта Холла. Для этого на ходовом винте имеется
штырь с закреплённым на нём постоянным магнитом. Распознавание положения
ходового винта происходит в узком угловом диапазоне в области нулевого
положения. Перед собственно датчиком Холла на плате датчиков расположены также
ещё два выключателя Холла. Эти выключатели служат для определения направления
движения ходового винта.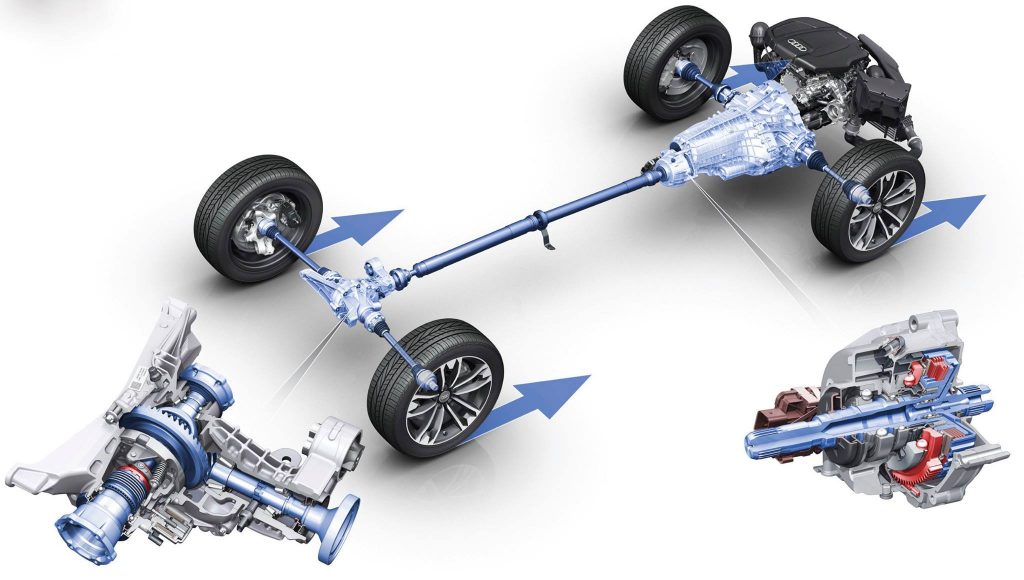
Рисунок 5.1.50 – Датчик нулевого положения рулевого механизма
Для привода механизма используется трёхфазный бесщёточный синхронный электродвигатель (рис.5.1.51). Трёхфазный ток для него создаётся в преобразователе AC/DC в силовом выходном каскаде блока управления. В электродвигателе имеется датчик положения ротора. Этот датчик регистрирует положение ротора с очень высокой точностью.
Рисунок 5.1.51 – Электродвигатель
Блок управления и выходной каскад представляют собой единый компактный узел, защищённый от брызг и влаги и привинчиваемый к электродвигателю. Блок управления подключён к шине FlexRay как низкоомное оконечное устройство. На основе поступающих в него определённых команд он рассчитывает необходимые значения тока для активации электродвигателя. Преобразователь AC/DC обеспечивает соответствующие значения напряжения, подаваемого на электродвигатель.
Для выполнения своих функций системе управления задней осью всегда требуются следующие измеряемые величины/данные:
• Угловые скорости вращения колёс
Значения
угловых скоростей вращения колёс в виде сообщений отправляются блоком
управления ABS J104 на шину FlexRay.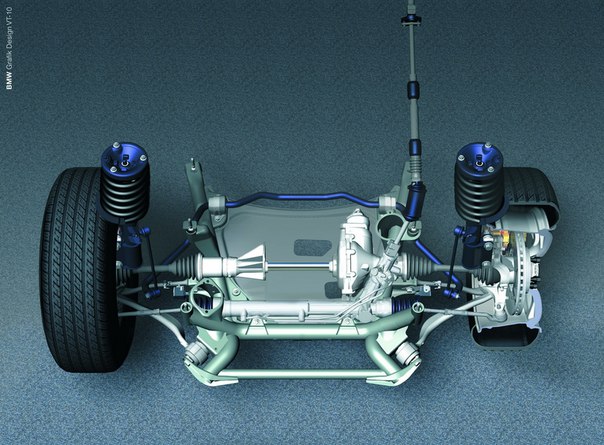 Блок управления управляемой задней
подвески J1019 рассчитывает на их основе эталонную скорость автомобиля, которая
в порядке резервирования сравнивается с эталонной скоростью автомобиля,
определённой системой ESP.
Блок управления управляемой задней
подвески J1019 рассчитывает на их основе эталонную скорость автомобиля, которая
в порядке резервирования сравнивается с эталонной скоростью автомобиля,
определённой системой ESP.
• Угол поворота рулевого колеса
Этот угол поворота регистрируется датчиком угла поворота рулевого колеса G85 и также передаётся в виде сообщения по шине FlexRay.
На основе двух главных параметров: скорости автомобиля и угла поворота колёс передней оси — блок управления рассчитывает требуемый угол поворота колёс задней оси.
При
кодировке блока управления в нём сохраняются характеристики, задающие угол
поворота задних колёс в зависимости от скорости автомобиля и угла поворота
передних колёс (угла поворота рулевого колеса). Разные характеристики
соответствуют разному характеру работы рулевого управления/динамическому
поведению автомобиля (желание водителя). Характеристики активируются в зависимости
от выбранной водителем настройки drive select и обеспечивают различные варианты
поведения рулевого управления: от ориентированного на комфорт до спортивного.
Если поворот водителем рулевого колеса происходит на невысоких скоростях (до прим. 40 км/ч), задние колёса отклоняются в противоположную передним сторону на угол около 5°.
При этом угол поворота задних колёс тем больше, чем больше угол поворота передних колёс (поворота рулевого колеса водителем), учитывается также скорость движения автомобиля.
При более высоких скоростях (начиная прим. с 50 км/ч) задние колёса поворачиваются в ту же сторону, что и передние, но на заметно меньший угол.
При неподвижном автомобиле задние колёса всегда находятся в нейтральном положении (исходное положение). Точное положение определяется исходя из анализа измеряемых величин датчика нулевого положения и датчика положения ротора.
В
исключительных случаях полный возврат задних колёс в нейтральное положение
может оказаться невозможным вследствие недостаточности возвратного усилия.
Такое может происходить в основном из-за загрузки автомобиля (большой вес,
приходящийся на ось), а также из-за свойств дорожного покрытия (высокий
коэффициент трения). В этом случае возврат колёс в точное нейтральное положение
происходит, только когда автомобиль снова начинает движение. Система
соответствующей индикацией предупреждает водителя, что колёса не находятся в
нейтральном положении.
В этом случае возврат колёс в точное нейтральное положение
происходит, только когда автомобиль снова начинает движение. Система
соответствующей индикацией предупреждает водителя, что колёса не находятся в
нейтральном положении.
Парковочный автопилот и ассистент маневрирования с прицепом могут «запрашивать» определённый угол поворота колёс задней оси. При этом названные блоки управления передают точные значения угла поворота колёс, которые затем обеспечиваются блоком управления управляемой задней оси J1019.
Система ESP также может оказывать определённое влияние на функционирование управляемой задней оси. В тех случаях, когда это требуется для поддержания курсовой устойчивости автомобиля, ESP может блокировать поворот задних колёс.
Подруливающие задние колеса автомобиля — Автосервис в Люберцах
При движении машины в небольшом пространстве зачастую встает вопрос, как лучше развернуться, чтобы ничего не задеть. Тут всплывает такая характеристика, как минимальный радиус разворота. На большой скорости, чтобы избежать заноса, тоже приходится задумываться, как помочь передним колесам увереннее войти в поворот и избежать фатального заноса.
На большой скорости, чтобы избежать заноса, тоже приходится задумываться, как помочь передним колесам увереннее войти в поворот и избежать фатального заноса.
Тут на первый план выходит подруливающее устройство для задних колес. В первом случае часто можно встретить такого помощника на автопогрузчиках и специальных машинах. Второй вариант давно применяется в гонках.
Разработки в этом направлении давно ведутся ведущими автомобильными фирмами мира.
Подруливающее устройство в современных авто работает следующим образом. Если скорость совсем мала, например, при тесной парковке или узкой улице с большим углом поворота, задние колеса отклоняются в противоположном направлении от передних примерно на 2-3 градуса. При езде в городском цикле угол уменьшается до одного-двух. Если же автомобиль набирает большую скорость, то задние колеса начинают в повороте поворачивать так, как и передние, только на совсем малую величину. Это дает возможность более уверенно держать машину при прохождении поворотов.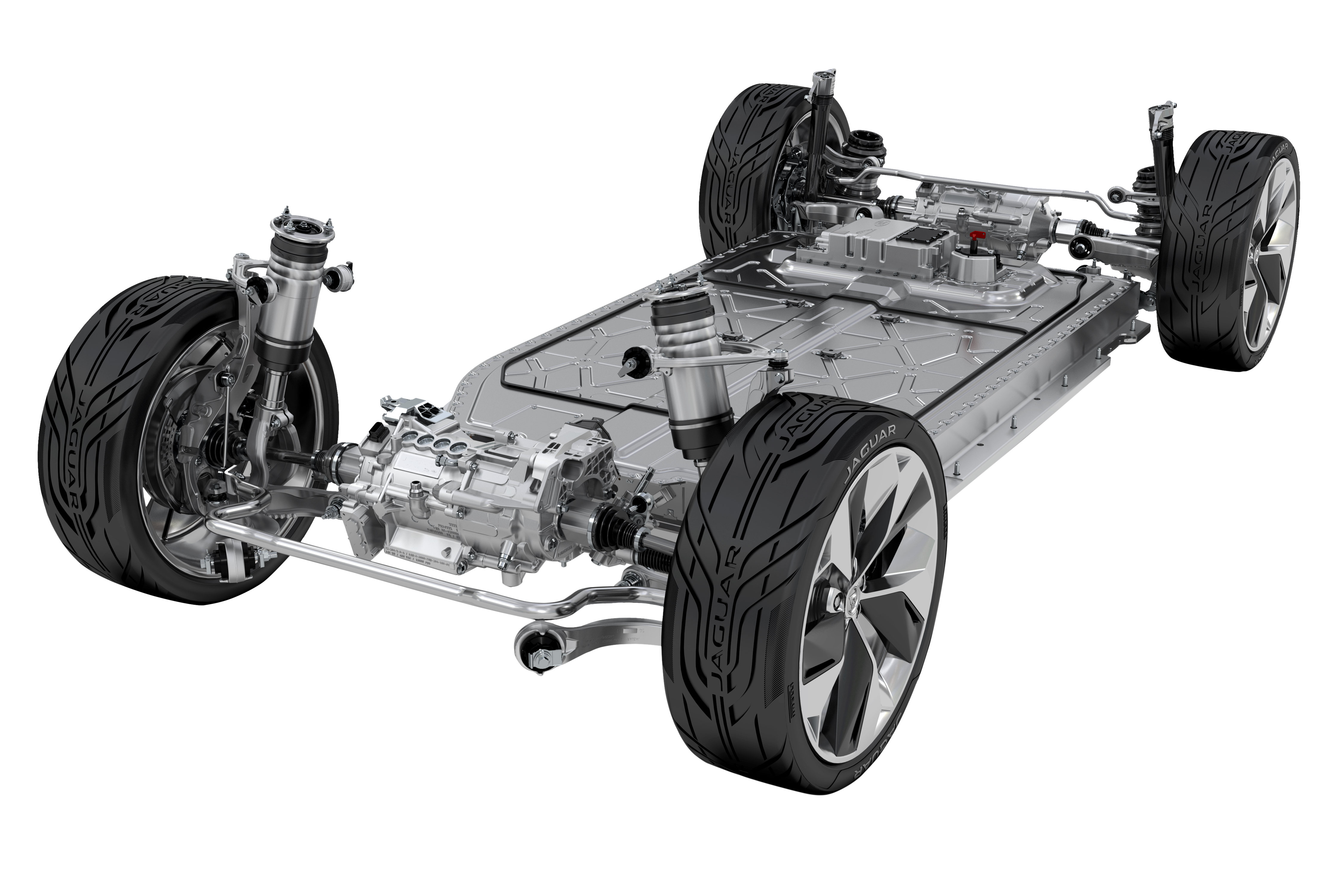
Подруливающее устройство задних колес бывает двух видов:
- Активное. При этом происходит одновременный поворот всех четырех колес. Задняя подвеска оборудована по такому же принципу, как и передняя. Но она не подчиняется непосредственно движению руля. Через сложную систему электроники сигнал подается на мотор подруливающего устройства заднего моста. Здесь идет анализ того, на какой угол отклонились передние колеса и какова была скорость. Помимо электронной системы, были попытки объединить передние и задние колеса с помощью гидравлической системы. Однако ввиду несовершенства и слабой надежности такого варианта от него пришлось отказаться.
- Пассивное. Эта подруливающая подвеска работает намного проще. При таком способе управления нет необходимости применять сложную электронную схему. Все происходит за счет передачи механической энергии с передних колес на задние при помощи рычагов Ватта. Благодаря их физическим особенностям при наборе высоких скоростей задние колеса повторяют маневр передних, но в гораздо меньших пределах.
 Такие системы стали очень часто применяться на современных серийных автомобилях.
Такие системы стали очень часто применяться на современных серийных автомобилях.
 Такие системы стали очень часто применяться на современных серийных автомобилях.
Такие системы стали очень часто применяться на современных серийных автомобилях.Преимущества и недостатки
Водители, привыкшие к обыкновенным автомобилям, не сразу укротят железного коня с подруливающей задней подвеской. С одной стороны, при разгоне и входе в поворот кажется, что задние колеса будут уменьшать радиус поворота, следовательно, нужно будет меньше поворачивать руль. Это, по идее, облегчает водителю управление. А по-другому – возникает существенный крен машины, задние колеса еще больше подворачивают, в результате получается занос. Управление автомобилем, который оборудован системой подруливающей задней подвески с недостаточной поворачиваемостью, заставляет входить в поворот как бы боком. Это ведет к необходимости большего поворота рулевого колеса.
Общая особенность этих вариантов: если задние управляемые колеса попадают в выбоину, автомобиль немного может бросить вбок.
Исследования по работе подруливающих подвесок ведутся до сих пор.
Дай газу! – Авто – Коммерсантъ
Что делать, если машину повело на дороге боком? Чем отличается занос от сноса? Как правильно перестраиваться на снежной каше? Как быть, если под колесами лед, но надо затормозить? Объясняют опрошенные «Автопилотом» эксперты.
— В повороте машину внезапно начинает нести боком. Какое типичное поведение водителя в этой ситуации и как нужно себя вести в действительности, чтобы выровнять автомобиль?
Существует несколько видов скольжений:
Снос (эффект недостаточной поворачиваемости): боковое скольжение передних колес. Вопреки сложившимся стереотипам снос может проявляться на автомобилях с любым типом привода. Автомобиль, скользя передними колесами, движется либо прямо, либо по более пологой траектории. Причина сноса — высокая скорость
Траектория движения машины в результате cноса
Траектория движения машины без cноса
Как с этим бороться?
Школа вождения BMW Driving Experience: Главное правило в данной ситуации — не доворачивать руль. Независимо от массы, класса и типа привода автомобиля ваши действия одинаковые. Необходимо отпустить газ и уменьшить угол поворота руля, чтобы восстановить сцепление с полотном.
Компания «Автодром—Тренинг» (контраварийная подготовка): Первое инстинктивное желание довернуть руль в поворот и является самой главной ошибкой. Довернув руль в поворот и тем самым уменьшив пятно контакта передних управляемых колес, водитель фактически лишает автомобиль возможности повернуть. Вслед за этим следует вылет машины наружу поворота, при правостороннем движении из левого на обочину, а из правого — на обочину.
Первое инстинктивное желание довернуть руль в поворот и является самой главной ошибкой
В реальности нужно уменьшить угол поворота передних колес, то есть плавно вернуть руль ближе к прямому положению передних колес или, другими словами, чуть-чуть убрать руль от поворота. Плавно и чуть-чуть — два ключевых слова. Это активная реакция на снос. И отпустить на мгновение педаль газа (закрыть газ) — это пассивная реакция на снос. Что происходит в этот момент? Благодаря закрытому газу часть веса автомобиля смещается на передние колеса (по аналогии с полной тарелкой супа, которую вы несете к своему столу и вдруг неожиданно замедляетесь). Передние колеса дополнительно прижались к поверхности, задние — разгрузились. Убирая руль от поворота (применяя обратное руление), вы заставляете заднюю ось автомобиля соскользнуть в занос (потерять устойчивость). Получается, что, повернув влево, попав на снос и убирая руль от поворота вправо, вы заставляете автомобиль повернуть влево, но уже за счет задних поскальзывающихся колес.
Передние колеса дополнительно прижались к поверхности, задние — разгрузились. Убирая руль от поворота (применяя обратное руление), вы заставляете заднюю ось автомобиля соскользнуть в занос (потерять устойчивость). Получается, что, повернув влево, попав на снос и убирая руль от поворота вправо, вы заставляете автомобиль повернуть влево, но уже за счет задних поскальзывающихся колес.
Школа вождения BMW Driving Experience:
Нести автомобиль боком может по-разному. Важно понимать, что именно происходит с автомобилем, причем на уровне тактильных и вестибулярных ощущений. Не допустить или решить возникшую проблемную ситуацию можно только в том случае, когда обладаешь необходимым комплексом рефлекторных ответов. Надо понимать, что страх может оказать парализующее воздействие. Кроме того, в экстренной стрессовой ситуации моторика, повинуясь инстинкту самосохранения, работает совершенно однозначно — всплывают или врожденные, или автоматические действия. В худшем случае водитель вцепится в руль, чтобы сохранить первоначальное положение тела в кресле, ведь мозг воспринимает происходящее как угрозу падения. Водители с большим стажем при возникновении боковых скольжений в подавляющем большинстве случаев применяют паническое рефлекторное торможение. Однако это по-прежнему не поможет справиться с заносом.
Водители с большим стажем при возникновении боковых скольжений в подавляющем большинстве случаев применяют паническое рефлекторное торможение. Однако это по-прежнему не поможет справиться с заносом.
Компания «Автодром-Тренинг» (контраварийная подготовка): Знаний об особенностях использования сил трения, качения, массы и прочих физических величин при экстремальных ситуациях обычный автолюбитель не имеет. Проявление инстинкта самосохранения человека всегда действует решительно и без предварительного согласования с разумом человека! Соответственно, при сносе автомобиля (передние колеса повернуты, машина едет прямо) автолюбитель мг
Подводя итоги: 10 лучших заднеприводных автомобилей
Неудивительно, что одна из самых обсуждаемых технологий автомобильных шасси возникла в Японии, стране, жители которой, похоже, родились с увлечением высокотехнологичными гаджетами и вещами.
Активное рулевое управление задними колесами было представлено в 1985 году.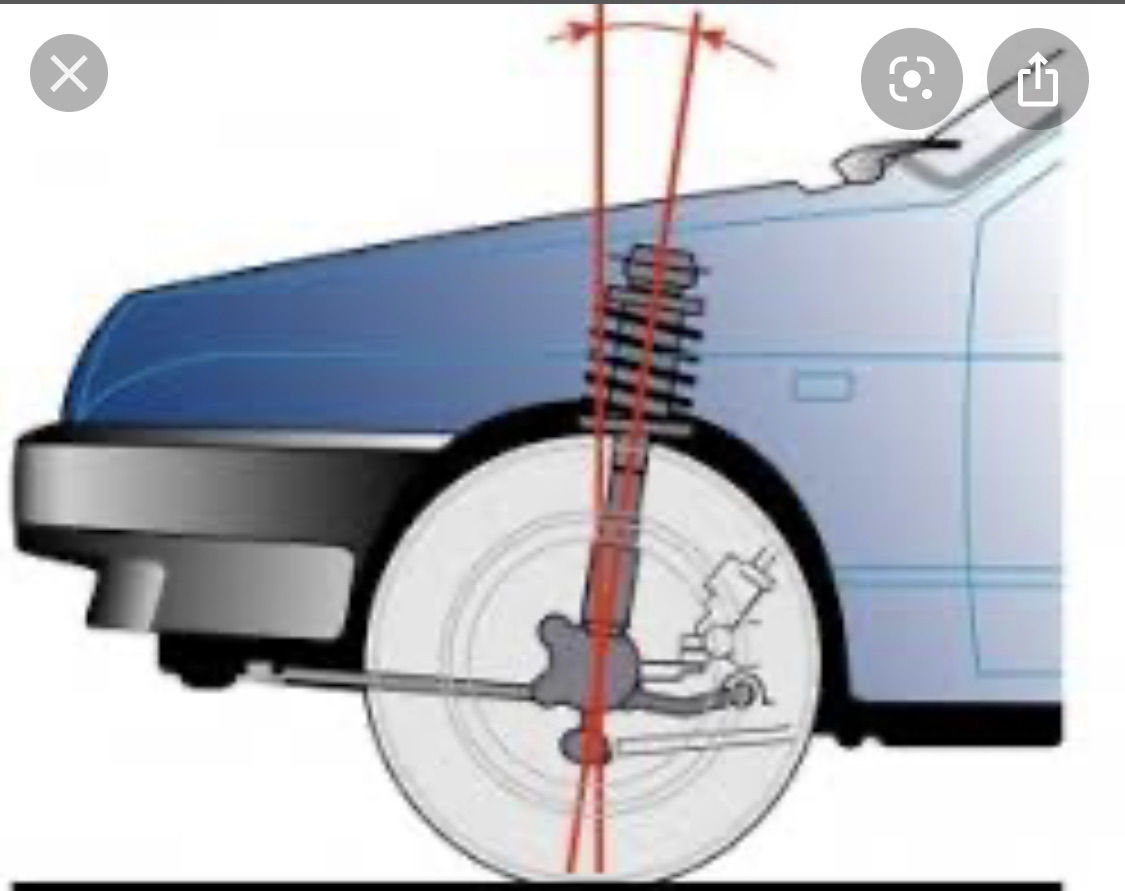 Соответственно, он дебютировал на Nissan R31 Skyline, автомобиле, который является синонимом инноваций, как лапша с раменом. Тем не менее, популяризировал эту технологию Honda Prelude 1987 года, которая продавалась по всему миру.
Соответственно, он дебютировал на Nissan R31 Skyline, автомобиле, который является синонимом инноваций, как лапша с раменом. Тем не менее, популяризировал эту технологию Honda Prelude 1987 года, которая продавалась по всему миру.
Преимущества активного рулевого управления четырьмя колесами были отмечены в американском журнале Road & Track. В 1987 году он взял Prelude 2.0Si 4WS, проложил трассу для слалома и поставил Honda против спортивных автомобилей Chevrolet, Ferrari и Porsche. Скромный японский салон превзошел их всех.
Как и многие инновации, ценность новизны рулевого управления всеми колесами с годами уменьшалась. В то же время страховщики стали опасаться счетов за ремонт — любой автомобиль, оснащенный дорогостоящим оборудованием, столкнулся с большими счетами за ремонт, если его ударили сзади.Исчезли системы управления задними колесами.
До тех пор, пока инженеры не осознали, что по мере того, как автомобили всех форм и размеров становились все больше и тяжелее, активные системы рулевого управления задними колесами могут помочь сделать их более маневренными, будь то на автостоянке или вокруг гоночной трассы.
Вот 10 основных моментов, прошлых и настоящих, моделей, которые принадлежали заднему рулевому комитету.
1 — BMW 850 CSi
Хотите знать причину, по которой флагманская версия 850 CSi E31 8-й серии настолько дешева в наши дни? Его система Aktive Hinterachs-Kinematik (AHK) имеет привычку выходить из строя, и ее исправление часто требует огромных затрат.Автомобиль был оснащен 5,6-литровым двигателем V12 мощностью 375 л.с. и получал выгоду от BMW Motorsport. Проблема была в том, что в начале 1990-х это стоило почти 80 000 фунтов стерлингов.
2 — Honda Prelude
Prelude был автомобилем, который привлек внимание общественности к управлению четырьмя колесами. Его система могла поворачивать задние колеса так же, как и передние, на 1,5 градуса и вплоть до поворота рулевого колеса до 246 градусов. Примените больше блокировки, и задние колеса смогут указывать в противоположном направлении на 5.33 градуса, что дает Honda компактный радиус поворота всего 10 метров, или 33 фута по старым ценам.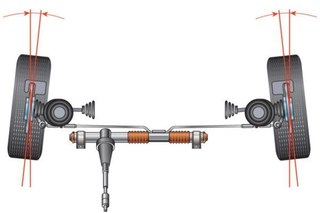 Однако стоимость сложного рулевого механизма не понравилась страховщикам, когда по Prelude ударили сзади.
Однако стоимость сложного рулевого механизма не понравилась страховщикам, когда по Prelude ударили сзади.
Автомобиль с передними и задними управляемыми колесами с индивидуальным приводом от гидравлических двигателей
Заголовок:
Автомобиль с передними и задними управляемыми колесами с индивидуальным приводом от гидравлических двигателей
Патент США 4549610
Аннотация:
Сельскохозяйственный трактор, имеющий шесть колес, каждое из которых гидравлически приводится в движение отдельными гидравлическими двигателями посредством гидравлической жидкости, подаваемой соответствующими гидравлическими насосами.Поскольку каждый насос приводит в движение только одно колесо, проскальзывание колеса не влияет на привод на другие колеса. Все насосы приводятся в движение одним двигателем. Селективно управляемое автоматическое управление означает регулирование скорости вращения колес, например, при повороте трактора. Средства управления также реагируют на сопротивление лобового сопротивления навесного оборудования, сцепленного с подъемными элементами трактора, и заставляют такие подъемные элементы подниматься, когда сопротивление навесного оборудования превышает заданный предел. Кроме того, скорость транспортного средства автоматически снижается из-за такого сопротивления, и, кроме того, положение орудия относительно земли может быть отрегулировано для смещения в месте расположения орудия вверх и вниз, движение сдвоенных колесных пар сзади трактора.Такая регулировка осуществляется подъемным устройством и задерживается на короткое время, чтобы транспортное средство могло двигаться.
Все насосы приводятся в движение одним двигателем. Селективно управляемое автоматическое управление означает регулирование скорости вращения колес, например, при повороте трактора. Средства управления также реагируют на сопротивление лобового сопротивления навесного оборудования, сцепленного с подъемными элементами трактора, и заставляют такие подъемные элементы подниматься, когда сопротивление навесного оборудования превышает заданный предел. Кроме того, скорость транспортного средства автоматически снижается из-за такого сопротивления, и, кроме того, положение орудия относительно земли может быть отрегулировано для смещения в месте расположения орудия вверх и вниз, движение сдвоенных колесных пар сзади трактора.Такая регулировка осуществляется подъемным устройством и задерживается на короткое время, чтобы транспортное средство могло двигаться.
Изобретателей:
Ван Дер, Лели Корнелис (Цуг, Швейцария)
Номер заявки:
06/155225
Дата публикации:
29. 10.1985
10.1985
Цессионарий:
ВАН ДЕР ЛЕЛИ; CORNELIS
Другие классы:
172/9, 172/12, 180/6.48, 280 / 446,1
Международные классы:
B60K17 / 356 ; B62D11 / 18 ; B62D61 / 10 ; (IPC1-7): A01B67 / 00; A01B63 / 112
Поле поиска:
180 / 6,48, 172/3, 172/7, 172/9, 172/12
Варианты рулевого управления прицепаPhillips | Irwin Car and Equipment
Опции рулевого управления прицепа
Phillips Products предлагает шесть различных стандартных вариантов рулевого управления для наших промышленных прицепов.Эти варианты рулевого управления, описанные и проиллюстрированные ниже, позволяют адаптировать наши управляемые прицепы к вашему конкретному применению, потребностям и бюджету.

Роликовый поворот
Существует множество способов позиционирования поворотных и жестких колес; два поворотных передних и два жестких задних — наиболее распространенная конструкция. Обычно это используется на небольших устройствах с ручным приводом. Стабильность отличная, так как все углы устройства поддерживаются.
Пятое колесо Steer
Наиболее распространенное устройство для тягачей — это седельно-сцепное устройство с управляемым колесом.Единый шарнир передней надстройки и седельно-сцепного устройства в сборе обеспечивает хорошую маневренность и простоту конструкции. Устойчивость хорошая, и этот тип «Стандарт» имеет широкую универсальность.
Управление четырьмя колесами
Наш четырехколесный управляемый автомобиль предназначен для использования в условиях ограниченного прохода и для буксировки нескольких единиц по типу «поезд». Поперечные стяжки синхронизированы с поворотным устройством на минимальной площади. Этот тип агрегата может быть оснащен съемным язычком, который позволяет буксировать его в любом направлении путем быстрой смены язычка.Общая устойчивость ниже, чем у колес, седельно-сцепных устройств или автомобилей. Также поставляется без стяжек и со стопорными штифтами и съемным язычком для управления «двойным пятым колесом», если это необходимо.
Этот тип агрегата может быть оснащен съемным язычком, который позволяет буксировать его в любом направлении путем быстрой смены язычка.Общая устойчивость ниже, чем у колес, седельно-сцепных устройств или автомобилей. Также поставляется без стяжек и со стопорными штифтами и съемным язычком для управления «двойным пятым колесом», если это необходимо.
Автомобильный руль
Наш автомобильный руль обеспечивает отличную устойчивость на больших агрегатах. Шарниры буксирного дышла на месте, а также каждый комплект передних колес. Колеса синхронизированы с поперечной балкой, чтобы поворачиваться на правильную величину для каждого отдельного радиуса, что обеспечивает легкое катание без задиров.
Четырехколесный автомобильный руль
Наш четырехколесный автомобильный руль сочетает в себе маневренность четырехколесного рулевого управления со стабильностью автомобильного рулевого управления, обеспечивая максимальную производительность.
Синхронизированное рулевое управление всеми колесами
Когда грузоподъемность, ограничения по высоте или нагрузка на грунт требуют наличия более четырех колес, но все же требуется максимальная маневренность, тогда необходимо синхронизированное рулевое управление всеми колесами.Этот агрегат более сложен, но имеет плавное рулевое управление без царапин.
Рулевое управление Акермана
Как машины поворачивают на поворотах? Управляется ли автомобиль передними или задними колесами, поворачивая передние колеса. *
* Почему? Это проблема стабильности. Если бы они управлялись сзади, незначительные отклонения угла усилились бы положительной обратной связью, увеличивая угол еще больше. Это похоже на разницу между перетаскиванием карандаша по столу за кончик пальца или попыткой протолкнуть его пальцем сзади. |
До автомобилей у нас были экипажи, запряженные лошадьми.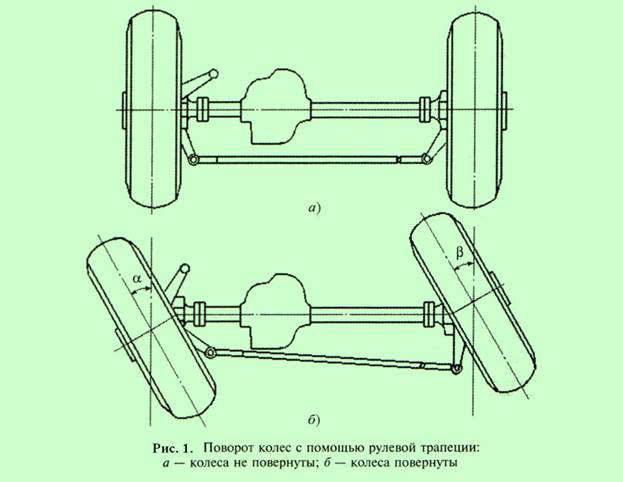 У них были большие открытые колеса.
У них были большие открытые колеса.
Каретки с короткой колесной базой имели фиксированные колеса, которые полагались на проскальзывание тонких колес, чтобы компенсировать занос при буксировке лошадьми, но маневренность на малых скоростях и более крутых поворотах или более длинной колесной базе обеспечивалась за счет поворота передней оси. Этот первый тип простого рулевого управления часто называют «поворотным рулевым управлением».В центре передней оси находится единственный шарнир. И передняя, и задняя оси прочные. |
При вращении передней оси геометрия регулируется так, чтобы обе оси были направлены в одну точку. Каждое колесо движется по кругу с общим центром (хотя и с разными радиусами), что устраняет необходимость в боковом скольжении или заносе. В простой каретке каждое колесо вращается независимо, и сила тяги не обеспечивается колесами, поэтому различия в окружностях компенсируются за счет того, что каждое колесо имеет немного разную скорость вращения. |
 Если бы автомобиль двигался по илистому полю, вы могли бы увидеть четыре дуги окружности при повороте.
Если бы автомобиль двигался по илистому полю, вы могли бы увидеть четыре дуги окружности при повороте.Это элегантное решение для маневренности, но у него довольно много проблем: ось должна проходить большие дуги, чтобы делать повороты, и это уменьшает полезное пространство внутри колесной базы (или требует, чтобы занимаемое пространство было выше обе оси). Это единственная точка напряжения, затрудняющая добавление подвески, а длинная ось действует как рычаг, усиливая небольшие колебания дорожного покрытия.
Следующее решение — простое рулевое управление. Здесь каждому колесу придана собственная ось. Это решает некоторые из вышеперечисленных проблем, но мы получаем возвращение проблемы бокового скольжения. Это, безусловно, лучше, чем полностью фиксированная передняя ось, которая требует значительного бокового скольжения, но, повернув оба колеса на один и тот же угол, мы можем увидеть, что каждое из передних колес имеет другой центр вращения. При простом рулевом управлении по крайней мере одно из передних колес будет испытывать боковое скольжение.Это проблема. Если мы представим себе транспортное средство с простым рулевым управлением, которое маневрирует по гравийной дороге, на каждом повороте, независимо от скорости, передние колеса будут пробираться по гравию, оставляя неприглядные колеи, и потребуют избыточного тягового усилия для преодоления этого дополнительного трения по сравнению с простым катанием. |

Идеальное решение
Идеальным решением было бы, чтобы каждое из передних колес управлялось независимо.Таким образом, каждый может быть установлен на идеальный угол, чтобы образовать касательную к дуге окружности с общим центром. |
Когда каждое колесо движется по дуге окружности правильного радиуса, не должно быть бокового скольжения. Чтобы решить проблему, заключающуюся в том, что разные колеса с приводом работают с разной скоростью вращения, в трансмиссии обычно размещается дифференциал в оси (возможно, это тема для будущей публикации в блоге…) |
Вот идеальная установка.
|
 Мы видим, что при повороте внутреннее колесо поворачивается на больший угол, чем внешнее.
Мы видим, что при повороте внутреннее колесо поворачивается на больший угол, чем внешнее.Если мы предполагаем постоянную скорость (без переноса веса или внешних сил), без крена кузова или эффектов подвески, а только с управляемым передним колесом, то мы можем использовать простую тригонометрию, чтобы найти идеальные углы для колес:
Вот эти углы, параметрически нанесенные на график. Используя некоторые примеры констант для L и T, по оси x нанесен угол внутреннего колеса, а по оси Y отложен угол внешнего колеса (оба угла нанесены в градусах), что соответствует диапазону возможных кривых.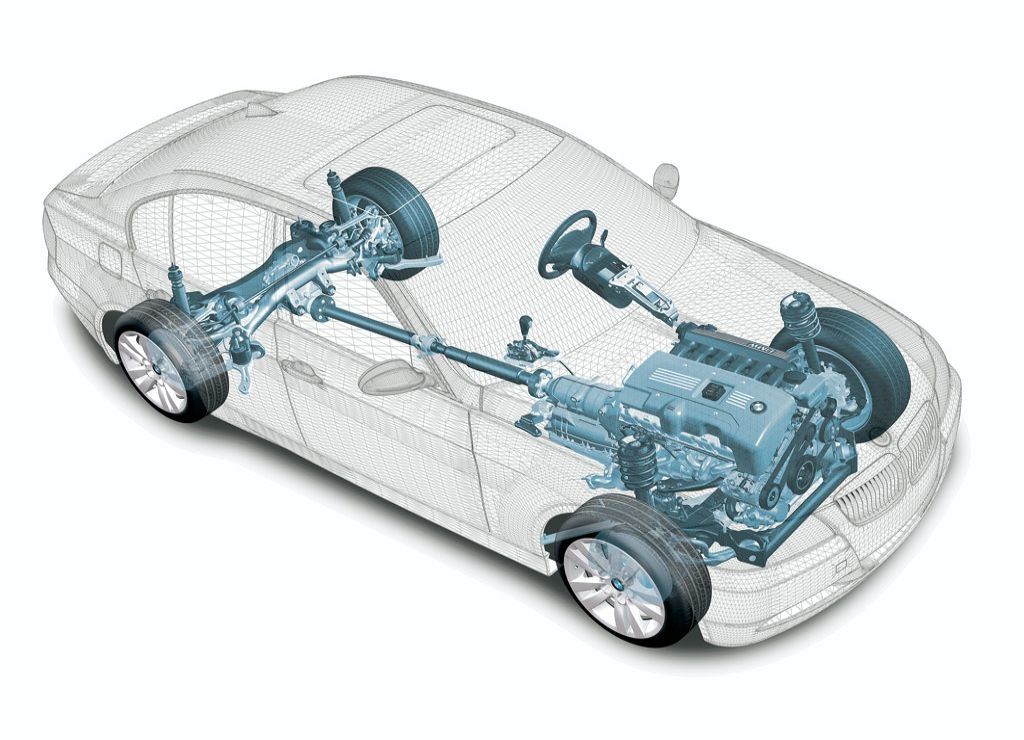 радиусы.
радиусы.
Красная линия показывает соотношение между двумя углами поворота колес для простого управления; здесь оба колеса вращаются параллельно, поэтому в результате получается прямая линия с единичным градиентом. Синяя линия показывает соотношение между двумя углами поворота колес для идеального управления. Для всех радиусов разворотов абсолютное значение внутреннего угла всегда выше, чем абсолютное значение внешнего угла. Чем круче поворот, тем больше отношение внутреннего угла к внешнему. |
Эти синие линии показывают идеальное соотношение между двумя углами, но это не простое соотношение. Задача создания механизма поворота колес таким образом — это проблема, решенная с помощью решения Аккермана.
Рулевое управление Акермана
Элегантный и простой механизм, приближающий идеальное рулевое управление, был запатентован в Англии в 1818 году Рудольфом Акерманом , и, хотя он назван в его честь, настоящим изобретателем был немецкий производитель карет по имени Георг Ланкенспергер , который разработал его двумя годами ранее.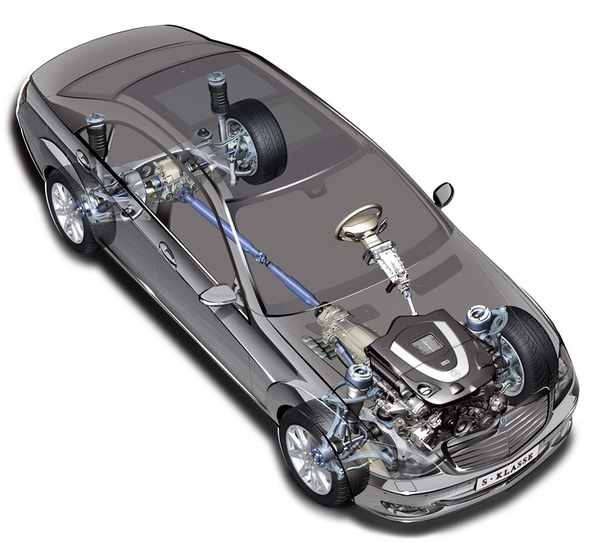
В рулевом управлении Акермана каждому колесу дается собственный шарнир (который обычно расположен близко к ступице колеса). Стяжки образуют форму трапеции с двумя дополнительными шарнирами. Поскольку форма имеет форму трапеции, при вращении внутреннего колеса внешнее колесо вращается с другой скоростью. Регулируя геометрию (длину рулевых тяг и угол, который они образуют с прямой), можно настроить относительное вращение колес.Если поперечная штанга, соединяющая два колеса, имеет такую же длину, как это расстояние между двумя шарнирами, то прямоугольник, который они создают, деформируется в параллелограмм при повороте колес, и конфигурация такая же, как , простое рулевое управление , и оба колеса повернуть с той же скоростью. |
Так как поперечная рулевая тяга сделана короче (схождение), чем ось, внутреннее колесо поворачивается с большей скоростью из-за деформации трапеции.
Уравнения для значений углов колес на основе длин стержней и начальных углов — более сложные вычисления, чем может показаться на первый взгляд. Если вы хотите узнать больше, ознакомьтесь с конфигурациями четырех стержневых рычагов Freudenstein. Система рулевого управления Ackerman обеспечивает лишь приблизительное решение идеального состояния рулевого управления.
Если вы хотите узнать больше, ознакомьтесь с конфигурациями четырех стержневых рычагов Freudenstein. Система рулевого управления Ackerman обеспечивает лишь приблизительное решение идеального состояния рулевого управления.
Слева вы можете увидеть пример того, насколько точно геометрия рулевого управления Акермана соответствует идеальному рулевому управлению. В 1878 году француз Шарль Жентод применил принцип Аккермана к своему транспортному средству с механическим приводом и обнаружил, что наилучшие результаты достигаются, когда проекции краев трапеции пересекаются над задней осью. |
Рулевое управление Ackerman решает большинство проблем рулевого управления поворотной платформой: пространство, необходимое для каждого колеса (продольный ход), значительно сокращается, а рычаг момента, передающий обратные неровности дороги, уменьшается.
Для небольших входов рулевого колеса разница между углами поворота мала. По мере уменьшения радиуса необходимого поворота разница в углах увеличивается (вы могли заметить, что когда вы поворачиваете колесо автомобиля до упора, например, при парковке, разница очень заметна).
По мере уменьшения радиуса необходимого поворота разница в углах увеличивается (вы могли заметить, что когда вы поворачиваете колесо автомобиля до упора, например, при парковке, разница очень заметна).
Угол скольжения
Все приведенные выше расчеты применимы к малой скорости. Однако когда нам нужно учитывать динамику транспортного средства, все становится сложнее. Когда транспортное средство движется в повороте, шина деформируется, и возникает разница между направлением движения и направлением, куда указывает шина. Это называется углом скольжения.
Профессиональные гонщики изменяют конфигурацию Ackerman своих автомобилей в соответствии с потребностями баланса. Существует предел сцепления, которое может обеспечить любая шина, и в зависимости от разницы между пробуксовкой спереди или сзади транспортного средства может возникнуть недостаточная или избыточная поворачиваемость.Некоторые водители даже настраивают свои автомобили с нейтральной геометрией Акермана (простое рулевое управление) или даже с геометрией анти-Акермана, чтобы уменьшить нагрев шин и снизить нагрузку на шины.