
Какие бывают двигатели ДВС?
Рядный шестицилиндровый двигатель является редким примером уравновешенного двигателя для авто, хотя это уже вымирающий вид подобных устройств. Мы спросили автоинструкторов, какой еще конструкции бывают ДВС, и на что эта конструкция влияет.
Когда конструкторская мысль бушевала…
В прошлом веке двигатель с 10 литрами мог быть одноцилиндровым или рядной «восьмеркой». В то время никто не удивлялся рядной «шестерке» с 23 литрами. Но, по воспоминаниям опытных инструкторов по вождению, рост мощностей и жесткая борьба за уменьшение себестоимости сделали свое дело. Простейший мотор с одним цилиндром для автомобилестроителей остался в прошлом. Сегодня средний объем цилиндра мотора обычного ТС составляет 300-600 см3.
Небольшие цилиндры сегодня устанавливаются на японские микролитражки.
Объем, к примеру, «четверки» у Subaru R1 составляет 658 см³.
Дешевле и проще
Любой нормальный конструктор хочет создать двигатель с упрощенным дизайном, легким в обслуживании и дешевым для производства. Самый простой мотор — это рядный (возьмем индексы R2, R3 и т.д.). Если расположить в ряд необходимое количество цилиндров, то мы получим рабочий объем.
Сегодня мода на двухцилиндровые двигатели набирает обороты, и все это благодаря турбонадуву, рядная «четверка» стоит в самом массовом диапазоне объема — 1-2,4 литра.
Пятицилиндровые моторы стали использоваться совсем недавно, примерно в 70-е годы прошлого столетия. Mercedes-Benz стал первым автомобилем «пятеркой». Чуть позже появился пятицилиндровый бензиновый двигатель с 2 литрами (Audi).
Вымирающий вид
Рядные «шестерки» постепенно отходят на второй план, а «восьмерка» вообще стала не просто вымирающим, а уже вымершим видом. Все дело в том, что из-за количества цилиндров мотор получается длиннее, а это в свою очередь затрудняет компоновку.
Надо сказать, что два двигателя R3 вместе дают отличный результат — рядную «шестерку» высокого качества.
Чтобы укоротить рядный двигатель, его можно, так скажем, «распилить» на две части, установить их рядом и заставить работать одновременно на один коленвал. Получается V-образный двигатель. А если у такого мотора цилиндры расположить друг против друга, то получится оппозитный двигатель или, как его называют, «боксер» (обозначение с буквой В). Последние используются очень редко из-за своих размеров.
Возникает вопрос: почему не сделать такие двигатели еще более компактными, например, установив угол развала блока на 60°? Об этом, конечно, задумывались, но здесь мешает вибрация.
Чем помешали вибрации и инерция?
По словам специалистов, поршневой мотор внутреннего сгорания не может функционировать без вибраций, которые даже разрушают детали двигателя, да и комфорта при езде не предносят.
Вибрации образуются по нескольким причинам. Первая заключается в том, что вспышки в цилиндрах идут неравномерно. Вторая — это неравномерный разгон поршней при движении. Третья причина: шатун движется не просто вверх-вниз, его движение довольно сложное.
Что касается инерции, то ее сила от двух масс, которые вращаются на одном валу, формируют свободный момент. Поэтому появляются составляющие среди сил инерции с удвоенной, утроенной и т.д. частотой вращения коленвала. Это силы инерции высших порядков, и они настолько малы, что ими вполне можно пренебречь. А вот силы второго порядка следует принимать во внимание. К тому же пары сил, имеющиеся на определенном расстоянии, также формируют моменты, особенно когда силы инерции в соседних цилиндрах направлены в совершенно разные стороны.
Уравновешенные и не совсем
На сегодняшний момент из двухцилиндровых моторов применяется лишь один. Это рядный двигатель с коленчатым валом, где кривошипы идут в одно направление. По степени уравновешенности такой двигатель очень похож на одноцилиндровый, ведь оба поршня вверх и вниз движутся одновременно, то есть в так называемой фазе. Для уравновешивания использовались два вала с противовесами.
Чтобы уравновесить силы второго порядка, добавляются еще пара балансирных валов, однако это совсем неуместно для двухцилиндрового двигателя, предназначенного для дешевых и небольших автомобилей.
Трехцилиндровый двигатель уравновешен намного хуже, чем, например, рядная «четверка». Именно поэтому производители трехцилиндровых двигателей (Daihatsu и Subaru) оснащают моторы балансирными валами.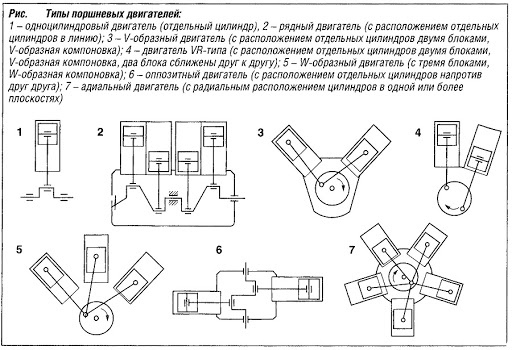 Чтобы уравновесить рядную «четверку», точнее свободную силу инерции 2-го порядка, применяется балансирный вал, который вращается в два раза быстрее. Чтобы компенсировать момент от балансирного вала ставится еще один вал, который вращается в противоположную сторону. Это, конечно, дороговато. Но такие двигатели встречаются на Mitsubishi, Fiat, Ford, Saab и Volkswagen.
Чтобы уравновесить рядную «четверку», точнее свободную силу инерции 2-го порядка, применяется балансирный вал, который вращается в два раза быстрее. Чтобы компенсировать момент от балансирного вала ставится еще один вал, который вращается в противоположную сторону. Это, конечно, дороговато. Но такие двигатели встречаются на Mitsubishi, Fiat, Ford, Saab и Volkswagen.
Ярким примером рядной «четверки» с установленными балансирными валами является двухлитровый мотор Audi.
Заметим, что оппозитная «четверка» уравновешена намного лучше, чем рядная. Но и «оппозитник» легендарного «Жука», и известные «боксеры» Subaru до сих пор обходятся без балансирных валов.
Видеоматериал о двигателе нового поколения — двигателе внешнего сгорания:
Легкой дороги и счастливого пути!
В статье использовано изображение с сайта widecars. ru
ru
Двигатель автомобиля (ДВС). Типы двигателей
Двигатель внутреннего сгорания (ДВС) – одно из главных устройств в конструкции автомобиля, служащее для преобразования энергии топлива в механическую энергию, которая, в свою очередь, выполняет полезную работу. Принцип работы двигателя внутреннего сгорания построен на том, что топливо в соединении с воздухом образуют воздушную смесь. Циклически сгорая в камере сгорания, воздушно-топливная смесь обеспечивает высокое давление, направленное на поршень, а тот, в свою очередь, вращает коленчатый вал через кривошипно-шатунный механизм. Его энергия вращения передается трансмиссии автомобиля.
Для запуска двигателя внутреннего сгорания часто используется стартер – обычно электрический двигатель, проворачивающий коленвал. В более тяжелых дизельных двигателях в качестве стартера и для той же цели применяется вспомогательный ДВС («пускач»).
Существуют следующие типы двигателей (ДВС):
- бензиновые
- дизельные
- газовые
- газодизельные
- роторно-поршневые
Также ДВС классифицируются: по виду топлива, по числу и расположению цилиндров, по способу формирования топливной смеси, по количеству тактов работы двигателя внутреннего сгорания и т.
Бензиновые и дизельные двигатели
Бензиновые двигатели внутреннего сгорания – наиболее распространенные из автомобильных двигателей. Топливом для них служит бензин. Проходя через топливную систему, бензин попадает через распыляющие форсунки в карбюратор или впускной коллектор, а затем эта воздушно-топливная смесь подается в цилиндры, сжимается под воздействием поршневой группы, поджигается искрой от свечей зажигания.
Карбюраторная система считается устаревшей, поэтому сейчас повсеместно используется инжекторная система подачи топлива. Распыляющие топливо форсунки (инжекторы) осуществляют впрыск либо непосредственно в цилиндр, либо во впускной коллектор. Инжекторные системы делятся на механические и электронные. Во-первых для дозации топлива используются механические рычаговые механизмы плунжерного типа, с возможностью электронного контроля топливной смеси. Во вторых процесс составления и впрыска топлива полностью возложен на электронный блок управления (ЭБУ).
Дизельные ДВС используют специальное дизтопливо. Двигатели автомобиля подобного типа не имеют системы зажигания: топливная смесь, попадающая в цилиндры через форсунки, способна взрываться под действием высокого давления и температуры, которые обеспечивает поршневая группа.
Газовые двигатели
Газовые двигатели используют газ в качестве топлива – сжиженный, генераторный, сжатый природный. Распространение таких двигателей было обусловлено растущими требованиями к экологической безопасности транспорта. Исходное топливо хранится в баллонах под большим давлением, откуда через испаритель попадает в газовый редуктор, теряя давление. Далее процесс аналогичен инжекторным бензиновым ДВС. В некоторых случаях газовые системы питания могут не использовать в своем составе испарители.
|
РЕКОМЕНДУЕМ ТАКЖЕ ПРОЧИТАТЬ:
|
Турбированный и атмосферный двигатели
ДВИГАТЕЛЬ| ТУРБИРОВАННЫЙ Турбированный двигатель – ДВС, который отличается наличием систтемы турбонадува (состоит из турбины, турбокомпрессора и промежуточного охладителя). | АТМОСФЕРНЫЙ Атмосферный двигатель — это классический ДВС, в котором подаваемый через инжектор (или карбюратор) воздух участвует в образовании топливной смеси в цилиндрах. Топливная смесь, воспламеняясь, создает энергию, приводящую в движение рабочие части двигателя. |
 Она создает принудительное давление с помощью выхлопных газов. В результате в цилиндры через инжектор закачивается большее количество воздуха, который смешиваясь с топливом, сгорает более эффективно. Как результат — выделяется больше энергии, приводящей в движение рабочие части двигателя
Она создает принудительное давление с помощью выхлопных газов. В результате в цилиндры через инжектор закачивается большее количество воздуха, который смешиваясь с топливом, сгорает более эффективно. Как результат — выделяется больше энергии, приводящей в движение рабочие части двигателя1,0 л. Чтобы развить максимальную мощность 125 л.с., условному турбированному двигателю может быть достаточно объема 1,0 л
| 1,6 л. Чтобы развить максимальную мощность, например, 125 л. |
 с., условный двигатель должен иметь рабочий объем не менее 1,6 л.
с., условный двигатель должен иметь рабочий объем не менее 1,6 л.При одной и той же мощности турбомоторы отличаются чуть лучшей динамикой и несколько меньшим расходом топлива. | Помимо, того что двигатель весит больше, он не способен поддерживать высокую мощность при езде в гористой местности с разреженным воздухом. |
150 000 Турбированный двигатель подвергается большим нагрузкам и потому изнашивается быстрее. При его правильной эксплуатации пробег до капитального ремонта может составлять 150 тыс. километров. | от 300 000 до 500 000 Из-за простой конструкции срок ресурсной эксплуатации «атмосферников» может исчисляться сотнями тысяч километров пробега. |
 Известны случаи, когда некоторые американские атмосферные двигатели «выхаживали» по 300-500 тыс. километров без капитального ремонта.
Известны случаи, когда некоторые американские атмосферные двигатели «выхаживали» по 300-500 тыс. километров без капитального ремонта.Нужно заправляться только качественным топливом, правильно запускать и останавливать мотор, следить за уровнем и качеством заливаемого масла. Смазка в турбодвигателе имеет большое значение, благодаря ему эффективно работают подшипники и другие важные элементы. Если уровень масла падает, он ибыстрее изнашиваются и выходят из строя. Поэтому масло необходимо своевременно доливать, а при его слишком быстром расходе — оперативно устранять неполадку, из-за которой это происходит. | Атмосферные двигатели более «лояльны» к качеству топлива и моторного масла. Хотя этими особенностями не стоит злоупотреблять, стоит отметить, что «атмосферники» отличаются высокой ремонтоспособностью, устранение возникающих неполакдок к них обойдется гораздо дешевле. |

Моторное масло QUARTZ 9000 5W-40 Высококачественное универсальное моторное масло, производимое по синтетической технологи, подходит как для атмосферных, так и для турбированных двигателей. API SN. Самая последняя спецификация по API — уровень SN. Характеризуется улучшенной защитой от высокотемпературных отложений на поршнях, более жесткими требованиями к контролю сажи и совместимости с уплотнителями. QUARTZ 9000 5W-40 обладает исключительными антиокислительными свойствамии особенно рекомендуется к применению в турбированных и мультиклапанных двигателях, а ткже в двигателях с непосредственным впрыском.
Подбор масла
Какие бывают двигатели? Типы электродвигателей. Асинхронные двигатели
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока).
 В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.Простой двигатель имеет 2 положения ротора (2 «мёртвые точки»), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные — электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные — замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).Синхронный — двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).
Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя.
Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.
Асинхронный — двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин — индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
- однофазные
- двухфазные
- трехфазные
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток.
 Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.
Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.
Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.
Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.
Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380.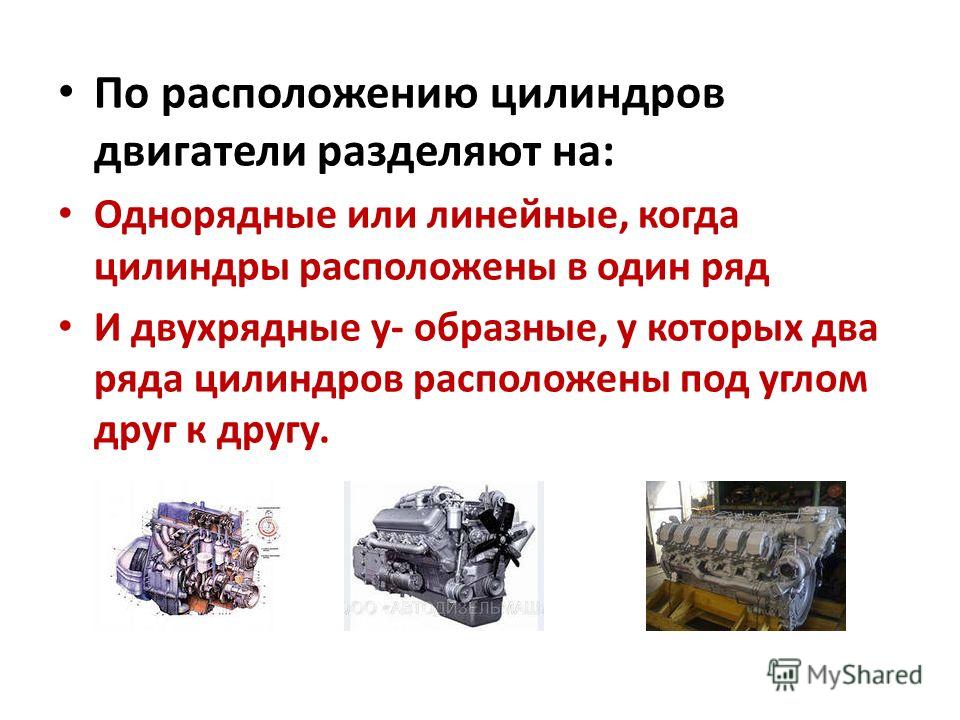 Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.
Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором.
какие они бывают / Хабр
В прошлых статьях был рассмотрен принцип работы синхронного и асинхронного электродвигателей, а также рассказано, как ими управлять. Но видов электродвигателей существует гораздо больше! И у каждого из них свои свойства, область применения и особенности.
В этой статье будет небольшой обзор по разным типам электродвигателей с фотографиями и примерами применений. Почему в пылесос ставятся одни двигатели, а в вентилятор вытяжки другие? Какие двигатели стоят в сегвее? А какие двигают поезд метро?
Каждый электродвигатель обладает некоторыми отличительными свойствами, которые обуславливают его область применения, в которой он наиболее выгоден. Синхронные, асинхронные, постоянного тока, коллекторные, бесколлекторные, вентильно-индукторные, шаговые… Почему бы, как в случае с двигателями внутреннего сгорания, не изобрести пару типов, довести их до совершенства и ставить их и только их во все применения? Давайте пройдемся по всем типам электродвигателей, а в конце обсудим, зачем же их столько и какой двигатель «самый лучший».
С этим двигателем все должны быть знакомы с детства, потому что именно этот тип двигателя стоит в большинстве старых игрушек. Батарейка, два проводка на контакты и звук знакомого жужжания, вдохновляющего на дальнейшие конструкторские подвиги. Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Двигатели постоянного тока бывают как очень маленького размера («вибра» в телефоне), так и довольно большого – обычно до мегаватта. Например, на фото ниже показан тяговый электродвигатель электровоза мощностью 810кВт и напряжением 1500В.
Почему ДПТ не делают мощнее? Главная проблема всех ДПТ, а в особенности ДПТ большой мощности – это коллекторный узел. Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5МВт).
В потребительском качестве ДПТ хорош своей простотой с точки зрения управляемости. Его момент прямо пропорционален току якоря, а частота вращения (по крайней мере холостой ход) прямо пропорциональна приложенному напряжению. Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Также нужно упомянуть, как именно в ДПТ формируется магнитный поток возбуждения, с которым взаимодействует якорь (ротор) и за счет этого возникает вращающий момент. Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже. Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Как ни странно, это самый распространенный в быту электродвигатель, название которого наименее известно. Почему так получилось? Его конструкция и характеристики такие же, как у двигателя постоянного тока, поэтому упоминание о нем в учебниках по приводу обычно помещается в самый конец главы про ДПТ. При этом ассоциация коллектор = ДПТ так прочно заседает в голове, что не всем приходит на ум, что двигатель постоянного тока, в названии которого присутствует «постоянный ток», теоретически можно включать в сеть переменного тока. Давайте разберемся.
Как изменить направление вращения двигателя постоянного тока? Это знают все, надо сменить полярность питания якоря. А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
Этот тип двигателей наиболее широко распространен в бытовой технике, где требуется регулировать частоту вращения: дрели, стиральные машины (не с «прямым приводом»), пылесосы и т.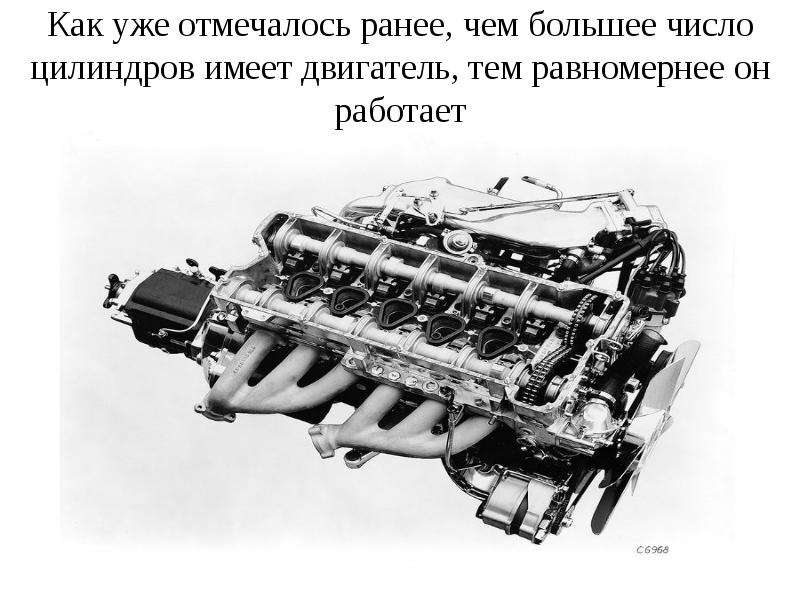 п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
Еще более распространенным, чем коллекторные двигатели, является асинхронный двигатель. Только распространен он в основном в промышленности – где присутствует трехфазная сеть. Про принцип его работы написана
отдельная статья. Если кратко, то его статор – это распределенная двухфазная или трехфазная (реже многофазная) обмотка. Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным).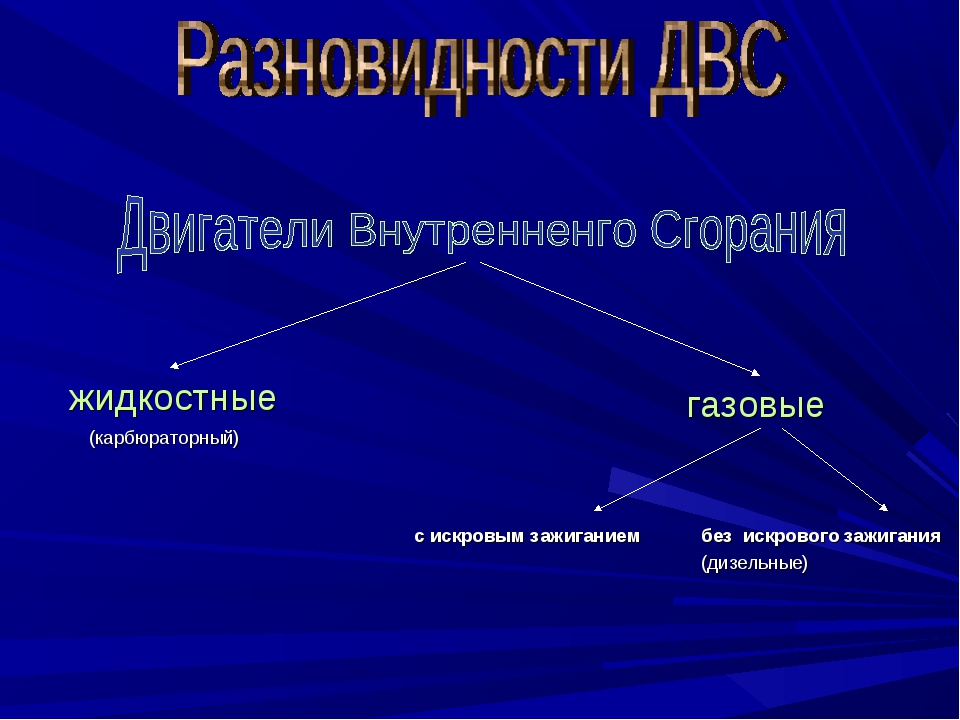 Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
Почему асинхронный двигатель так популярен? У него нет скользящего контакта, как у коллекторного двигателя, а поэтому он более надежен и требует меньше обслуживания. Кроме того, такой двигатель может пускаться от сети переменного тока «прямым пуском» – его можно включить коммутатором «на сеть», в результате чего двигатель запустится (с большим пусковым током 5-7 крат, но допустимым). ДПТ относительно большой мощности так включать нельзя, от пускового тока погорит коллектор. Также асинхронные привода, в отличие от ДПТ, можно делать гораздо большей мощности – десятки мегаватт, тоже благодаря отсутствию коллектора. При этом асинхронный двигатель относительно прост и дешев.
Асинхронный двигатель применяется и в быту: в тех устройствах, где не нужно регулировать частоту вращения. Чаще всего это так называемые «конденсаторные» двигатели, или, что тоже самое, «однофазные» асинхронники.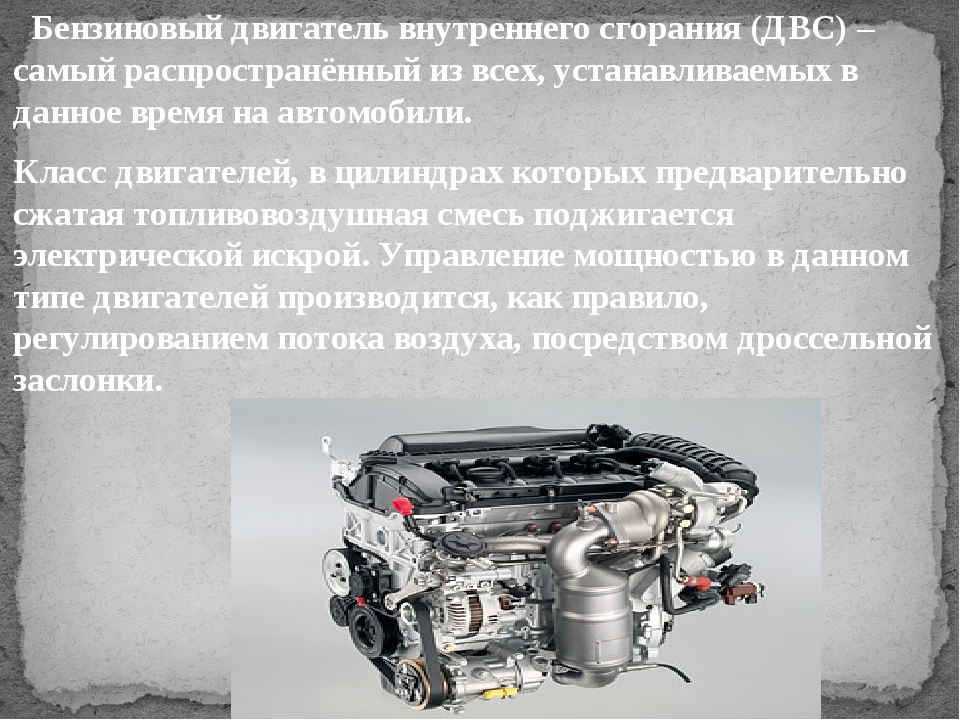 Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Минус асинхронного двигателя по сравнению с ДПТ в том, что его сложно регулировать. Асинхронный электродвигатель – это двигатель переменного тока. Если асинхронному двигателю просто понизить напряжение, не понизив частоту, то он несколько снизит скорость, да. Но у него увеличится так называемое скольжение (отставание частоты вращения от частоты поля статора), увеличатся потери в роторе, из-за чего он может перегреться и сгореть. Можно представлять это себе как регулирование скорости движения легкового автомобиля исключительно сцеплением, подав полный газ и включив четвертую передачу. Чтобы правильно регулировать частоту вращения асинхронного двигателя нужно пропорционально регулировать и частоту, и напряжение. А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
Про принцип работы синхронного двигателя также
была отдельная статья. Синхронных приводов бывает несколько подвидов – с магнитами (PMSM) и без (с обмоткой возбуждения и контактными кольцами), с синусоидальной ЭДС или с трапецеидальной (бесколлекторные двигатели постоянного тока, BLDC). Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности.
Все эти машины выполнялись с контактными кольцами (можно увидеть на фото), о возбуждении от постоянных магнитов при таких мощностях речи, конечно же, не идет. При этом у синхронного двигателя, в отличие от асинхронного, большие проблемы с пуском. Если включить мощную синхронную машину напрямую на трехфазную сеть, то всё будет плохо. Так как машина синхронная, она должна вращаться строго с частотой сети. Но за время 1/50 секунды ротор, конечно же, разогнаться с нуля до частоты сети не успеет, а поэтому он будет просто дергаться туда-сюда, так как момент получится знакопеременный. Это называется «синхронный двигатель не вошел в синхронизм». Поэтому в реальных синхронных машинах применяют асинхронный пуск – делают внутри синхронной машины небольшую асинхронную пусковую обмотку и закорачивают обмотку возбуждения, имитируя «беличью клетку» асинхронника, чтобы разогнать машину до частоты, примерно равной частоте вращения поля, а уже после этого включается возбуждение постоянным током и машина втягивается в синхронизм.
И если у асинхронного двигателя регулировать частоту ротора без изменения частоты поля хоть как-то можно, то у синхронного двигателя нельзя никак. Он или крутится с частой поля, или выпадает из синхронизма и с отвратительными переходными процессами останавливается. Кроме того, у синхронного двигателя без магнитов есть контактные кольца – скользящий контакт, чтобы передавать энергию на обмотку возбуждения в роторе. С точки зрения сложности, это, конечно, не коллектор ДПТ, но всё равно лучше бы было без скользящего контакта. Именно поэтому в промышленности для нерегулируемой нагрузки применяют в основном менее капризные асинхронные привода.
Но все изменилось с появлением силовой полупроводниковой электроники и микроконтроллеров. Они позволили сформировать для синхронной машины любую нужную частоту поля, привязанную через датчик положения к ротору двигателя: организовать вентильный режим работы двигателя (автокоммутацию) или векторное управление. При этом характеристики привода целиком (синхронная машина + инвертор) получились такими, какими они получаются у двигателя постоянного тока: синхронные двигатели заиграли совсем другими красками.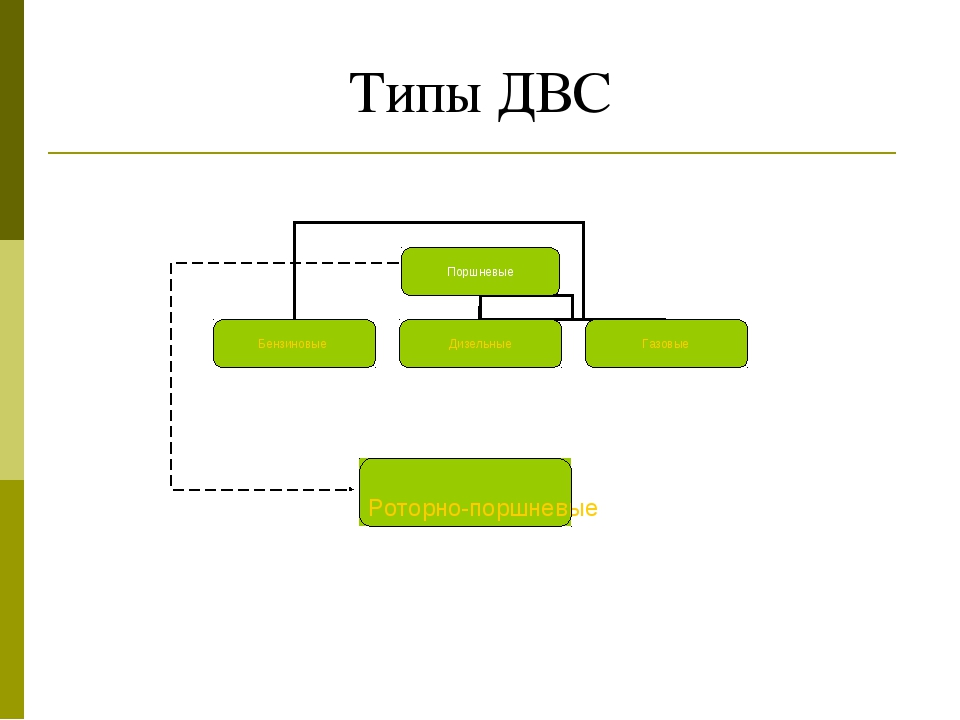 Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
У него много названий. Обычно его коротко называют вентильно-индукторный двигатель (ВИД) или вентильно-индукторная машина (ВИМ) или привод (ВИП). В английской терминологии это switched reluctance drive (SRD) или motor (SRM), что переводится как машина с переключаемым магнитным сопротивлением.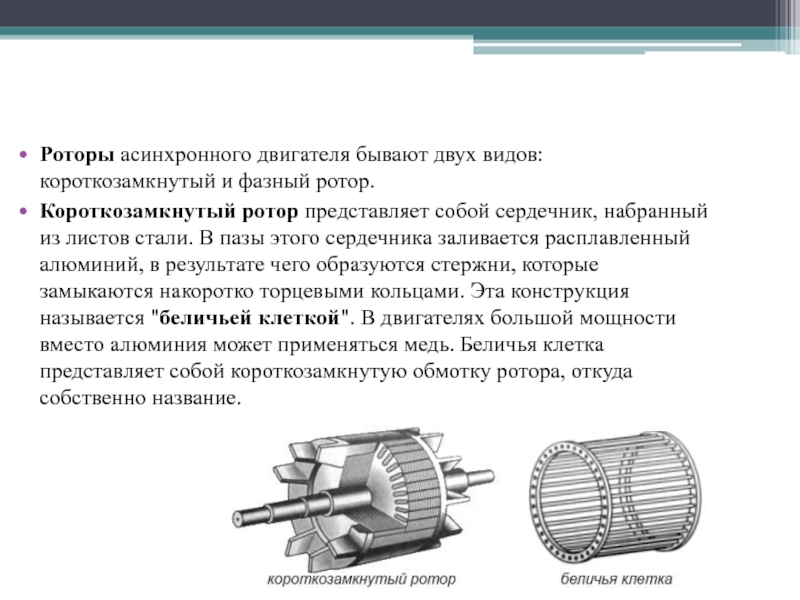 Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).
Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).
Конструктивно это самый простой двигатель и по принципу действия похож на некоторые шаговые двигатели. Ротор – зубчатая железка. Статор – тоже зубчатый, но с другим числом зубцов. Проще всего принцип работы поясняет вот эта анимация:
Подавая постоянный ток в фазы в соответствии с текущим положением ротора можно заставить двигатель вращаться. Фаз может быть разное количество. Форма тока реального привода для трех фаз показа на рисунке (токоограничение 600А):
Однако за простоту двигателя приходится платить. Так как двигатель питается однополярными импульсами тока, напрямую «на сеть» его включать нельзя. Обязательно требуется преобразователь и датчик положения ротора. Причем преобразователь не классический (типа шестиключевой инвертор): для каждой фазы у преобразователя для SRD должны быть полумосты, как на фото в начале этого раздела. Проблема в том, что для удешевления комплектующих и улучшения компоновки преобразователей силовые ключи и диоды часто не изготавливаются отдельно: обычно применяются готовые модули, содержащие одновременно два ключа и два диода – так называемые стойки. И именно их чаще всего и приходится ставить в преобразователь для ВИД СВ, половину силовых ключей просто оставляя незадействованной: получается избыточный преобразователь. Хотя в последние годы некоторые производители IGBT модулей выпустили изделия, предназначенные именно для SRD.
Так как двигатель питается однополярными импульсами тока, напрямую «на сеть» его включать нельзя. Обязательно требуется преобразователь и датчик положения ротора. Причем преобразователь не классический (типа шестиключевой инвертор): для каждой фазы у преобразователя для SRD должны быть полумосты, как на фото в начале этого раздела. Проблема в том, что для удешевления комплектующих и улучшения компоновки преобразователей силовые ключи и диоды часто не изготавливаются отдельно: обычно применяются готовые модули, содержащие одновременно два ключа и два диода – так называемые стойки. И именно их чаще всего и приходится ставить в преобразователь для ВИД СВ, половину силовых ключей просто оставляя незадействованной: получается избыточный преобразователь. Хотя в последние годы некоторые производители IGBT модулей выпустили изделия, предназначенные именно для SRD.
Следующая проблема – это пульсации вращающего момента. В силу зубчатой структуры и импульсного тока момент редко получается стабильным – чаще всего он пульсирует. Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Однако даже при этих недостатках двигатели остаются перспективными в качестве регулируемого привода. Благодаря их простоте сам двигатель получается дешевле классического асинхронного двигателя. Кроме того, двигатель легко сделать многофазным и многосекционным, разделив управление одним двигателем на несколько независимых преобразователей, которые работают параллельно. Это позволяет повысить надежность привода – отключение, скажем, одного из четырех преобразователей не приведет к остановке привода в целом – трое соседей будут какое-то время работать с небольшой перегрузкой. Для асинхронного двигателя такой фокус выполнить так просто не получается, так как невозможно сделать несвязанные друг с другом фазы статора, которые бы управлялись отдельным преобразователем полностью независимо от других.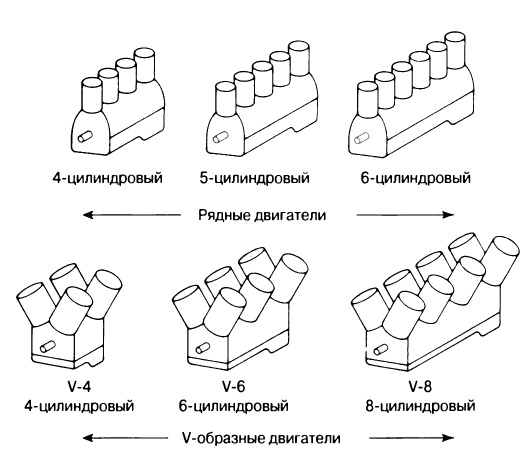 Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Мы на фирме ООО «НПФ ВЕКТОР» выполнили несколько проектов на базе этого двигателя. Например, делали небольшой привод для насосов горячего водоснабжения, а также недавно закончили разработку и отладку системы управления для мощных (1,6 МВт) многофазных резервируемых приводов для обогатительных фабрик АК «АЛРОСА». Вот машинка на 1,25 МВт:
Вся система управления, контроллеры и алгоритмы были сделаны у нас в ООО «НПФ ВЕКТОР», силовые преобразователи спроектировала и изготовила фирма ООО «НПП «ЦИКЛ+». Заказчиком работы и проектировщиком самих двигателей являлась фирма ООО «МИП «Мехатроника» ЮРГТУ (НПИ)».
Это совсем другой тип двигателя, отличающийся по принципу действия от обычного ВИД. Исторически известны и широко используются вентильно-индукторные генераторы такого типа, применяемые на самолетах, кораблях, железнодорожном транспорте, а вот именно двигателями такого типа почему-то занимаются мало.
На рисунке схематично показана геометрия ротора и магнитный поток обмотки возбуждения, а также изображено взаимодействие магнитных потоков статора и ротора, при этом ротор на рисунке установлен в согласованное положение (момент равен нулю).
Ротор собран из двух пакетов (из двух половинок), между которыми установлена обмотка возбуждения (на рисунке показана как четыре витка медного провода). Несмотря на то, что обмотка висит «посередине» между половинками ротора, крепится она к статору и не вращается. Ротор и статор выполнены из шихтованного железа, постоянные магниты отсутствуют. Обмотка статора распределенная трехфазная – как у обычного асинхронного или синхронного двигателя. Хотя существуют варианты такого типа машин с сосредоточенной обмоткой: зубцами на статоре, как у SRD или BLDC двигателя. Витки обмотки статора охватывают сразу оба пакета ротора.
Упрощенно принцип работы можно описать следующим образом: ротор стремится повернуться в такое положение, при котором направления магнитного потока в статоре (от токов статора) и роторе (от тока возбуждения) совпадут. При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).
При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).
С точки зрения управления ВИД НВ оказывается эквивалентен синхронной машине с контактными кольцами. То есть, если вы не знаете конструкцию этой машины и используете её как «черный ящик», то она ведет себя практически неотличимо от синхронной машины с обмоткой возбуждения. Можно сделать векторное управление или автокоммутацию, можно ослаблять поток возбуждения для повышения частоты вращения, можно усиливать его для создания большего момента – всё так, как будто это классическая синхронная машина с регулируемым возбуждением. Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:
Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:
Кроме того, ВИД НВ можно создавать многофазным и многосекционным, аналогично тому, как это делается в ВИД СВ. При этом фазы оказываются несвязанными друг с другом магнитными потоками и могут работать независимо. Т.е. получается как будто бы несколько трехфазных машин в одной, к каждой из которых присоединяется свой независимый инвертор с векторным управлением, а результирующая мощность просто суммируется. Координации между преобразователями при этом не требуется никакой – только общее задание частоты вращения.
Минусы этого двигателя тоже есть: напрямую от сети он крутиться не может, так как, в отличие от классических синхронных машин, ВИД НВ не имеет асинхронной пусковой обмотки на роторе. Кроме того, он сложнее по конструкции, чем обычный ВИД СВ (SRD).
На основе данного двигателя мы также сделали несколько успешных проектов. Например, один из них – это серия приводов насосов и вентиляторов для районных теплостанций г. Москвы мощностью 315-1200кВт (ссылка на проект). Это низковольтные (380В) ВИД НВ с резервированием, где одна машина «разбита» на 2, 4 или 6 независимых трехфазных секций. На каждую секцию ставится свой однотипный преобразователь с векторным бездатчиковым управлением. Таким образом можно легко наращивать мощность на базе однотипной конструкции преобразователя и двигателя. При этом часть преобразователей подключено к одному вводу питания районной теплостанции, а часть к другому. Поэтому если происходит «моргушка питания» по одному из вводов питания, то привод не встает: половина секций кратковременно работают в перегрузке, пока питание не восстановится. Как только оно восстанавливается, на ходу в работу автоматически вводятся отдыхавшие секции. Вообще, наверное, этот проект заслуживал бы отдельной статьи, поэтому пока про него закончу, вставив фото двигателя и преобразователей:
К сожалению, двумя словами здесь не обойтись. И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
Давайте рассмотрим регулируемый электропривод, режим работы которого – длительный. Коллекторные машины здесь сразу исключаются из конкуренции по причине ненадежности коллекторного узла. Но остались еще четыре – синхронный, асинхронный, и два типа вентильно-индукторных. Если мы говорим о приводе насоса, вентилятора и чего-то похожего, что используется в промышленности и где масса и габариты особо не важны, то здесь из конкуренции выпадают синхронные машины. Для обмотки возбуждения требуются контактные кольца, что является капризным элементом, а постоянные магниты очень дороги. Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Как показывает опыт, все три типа машин успешно применяются. Но – асинхронный привод невозможно (или очень сложно) секционировать, т.е. разбить мощную машину на несколько маломощных. Поэтому для обеспечения большой мощности асинхронного преобразователя требуется делать его высоковольтным: ведь мощность – это, если грубо, произведение напряжения на ток. Если для секционируемого привода мы можем взять низковольтный преобразователь и наставить их несколько, каждый на небольшой ток, то для асинхронного привода преобразователь должен быть один. Но не делать же преобразователь на 500В и ток 3 килоампера? Это провода нужны с руку толщиной. Поэтому для увеличения мощности повышают напряжение и снижают ток. А высоковольтный преобразователь – это совсем другой класс задачи. Нельзя просто так взять силовые ключи на 10кВ и сделать из них классический инвертор на 6 ключей, как раньше: и нет таких ключей, а если есть, они очень дороги. Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность. ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.
Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность. ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.
Но всё становится еще интереснее, когда речь заходит о транспорте или о малогабаритных устройствах. Там уже нельзя беспечно относиться к массе и габаритам электропривода. И вот там уже нужно смотреть на синхронные машины с постоянными магнитами. Если посмотреть только на параметр мощности деленной на массу (или размер), то синхронные машины с постоянными магнитами вне конкуренции. Отдельные экземпляры могут быть в разы меньше и легче, чем любой другой «безмагнитный» привод переменного тока. Но здесь есть одно опасное заблуждение, которое я сейчас постараюсь развеять.
Там уже нельзя беспечно относиться к массе и габаритам электропривода. И вот там уже нужно смотреть на синхронные машины с постоянными магнитами. Если посмотреть только на параметр мощности деленной на массу (или размер), то синхронные машины с постоянными магнитами вне конкуренции. Отдельные экземпляры могут быть в разы меньше и легче, чем любой другой «безмагнитный» привод переменного тока. Но здесь есть одно опасное заблуждение, которое я сейчас постараюсь развеять.
Если синхронная машина в три раза меньше и легче – это не значит, что для электротяги она подходит лучше. Всё дело в отсутствии регулировки потока постоянных магнитов. Поток магнитов определяет ЭДС машины. На определенной частоте вращения ЭДС машины достигает напряжения питания инвертора и дальнейшее повышение частоты вращения становится затруднительно. Тоже самое касается и повышения момента. Если нужно реализовать больший момент, в синхронной машине нужно повышать ток статора – момент возрастет пропорционально. Но более эффективно было бы повысить и поток возбуждения – тогда и магнитное насыщение железа было бы более гармоничным, а потери были бы ниже. Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):
Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):
На рисунке по горизонтальной оси отложен момент двигателя, по вертикальной – частота вращения. Звездочкой отмечена точка номинального режима, например, пусть это будет 60кВт. Заштрихованный прямоугольник – это диапазон, где возможно регулирование синхронной машины без проблем – т.е. «вниз» по моменту и «вниз» по частоте от номинала. Красной линией отмечено, что можно выжать из синхронной машины сверх номинала – небольшое повышение частоты вращения за счет так называемого ослабления поля (на самом деле это создание лишнего реактивного тока по оси d двигателя в векторном управлении), а также показана некоторая возможная форсировка по моменту, чтобы было безопасно для магнитов. Всё. А теперь давайте поставим эту машину в легковое транспортное средство без коробки передач, где батарея рассчитана на отдачу 60кВт. Желаемая тяговая характеристика изображена синим. Т.е. начиная с самой низкой скорости, скажем, с 10км/ч привод должен развивать свои 60кВт и продолжать их развивать вплоть до максимальной скорости, скажем 150км/ч. Синхронная машина и близко не лежала: её момента не хватит даже чтобы заехать на бордюр у подъезда (или на поребрик у парадной, для полит. корректности), а разогнаться машина сможет лишь до 50-60км/ч.
Всё. А теперь давайте поставим эту машину в легковое транспортное средство без коробки передач, где батарея рассчитана на отдачу 60кВт. Желаемая тяговая характеристика изображена синим. Т.е. начиная с самой низкой скорости, скажем, с 10км/ч привод должен развивать свои 60кВт и продолжать их развивать вплоть до максимальной скорости, скажем 150км/ч. Синхронная машина и близко не лежала: её момента не хватит даже чтобы заехать на бордюр у подъезда (или на поребрик у парадной, для полит. корректности), а разогнаться машина сможет лишь до 50-60км/ч.
Что же это значит? Синхронная машина не подходит для электротяги без коробки передач? Подходит, конечно же, просто надо по-другому её выбрать. Вот так:
Надо выбрать такую синхронную машину, чтобы требуемый тяговый диапазон регулирования был весь внутри её механической характеристики. Т.е. чтобы машина одновременно могла развить и большой момент, и работать на большой частоте вращения. Как вы видите из рисунка… установленная мощность такой машины будет уже не 60кВт, а 540кВт (можно посчитать по делениям). Т.е. в электромобиль с батареей на 60кВт придется установить синхронную машину и инвертор на 540кВт, просто чтобы «пройти» по требуемому моменту и частоте вращения.
Т.е. в электромобиль с батареей на 60кВт придется установить синхронную машину и инвертор на 540кВт, просто чтобы «пройти» по требуемому моменту и частоте вращения.
Конечно же, так как описано, никто не делает. Никто не ставит машину на 540кВт вместо 60кВт. Синхронную машину модернизируют, пытаясь «размазать» её механическую характеристику из оптимума в одной точке вверх по скорости и вниз по моменту. Например, прячут магниты в железо ротора (делают инкорпорированными), это позволяет не бояться размагнитить магниты и ослаблять поле смелее, а также перегружать по току побольше. Но от таких модификаций синхронная машина набирает вес, габариты и становится уже не такой легкой и красивой, какой она была раньше. Появляются новые проблемы, такие как «что делать, если в режиме ослабления поля инвертор отключился». ЭДС машины может «накачать» звено постоянного тока инвертора и выжечь всё. Или что делать, если инвертор на ходу пробился — синхронная машина замкнется и может токами короткого замыкания убить и себя, и водителя, и всю оставшуюся живой электронику — нужны схемы защиты и т. п.
п.
Поэтому синхронная машина хороша там, где большого диапазона регулирования не требуется. Например, в сегвее, где скорость с точки зрения безопасности может быть ограничена на 30км/ч (или сколько там у него?). А еще синхронная машина идеальна для вентиляторов: у вентилятора сравнительно мало изменяется частота вращения, от силы раза в два – больше особо нет смысла, так как воздушный поток ослабевает пропорционально квадрату скорости (примерно). Поэтому для небольших пропеллеров и вентиляторов синхронная машина – это то, что нужно. И как раз она туда, собственно, успешно ставится.
Тяговую кривую, изображенную на рисунке синим цветом, испокон веков реализуют двигатели постоянного тока с регулируемым возбуждением: когда ток обмотки возбуждения изменяют в зависимости от тока статора и частоты вращения. При увеличении частоты вращения уменьшается и ток возбуждения, позволяя машине разгоняться выше и выше. Поэтому ДПТ с независимым (или смешанным) управлением возбуждением классически стоял и до сих пор стоит в большинстве тяговых применений (метро, трамваи и т. п.). Какая же электрическая машина переменного тока может с ним поспорить?
п.). Какая же электрическая машина переменного тока может с ним поспорить?
К такой характеристике (постоянства мощности) могут лучше приблизиться двигатели, у которых регулируется возбуждение. Это асинхронный двигатель и оба типа ВИПов. Но у асинхронного двигателя есть две проблемы: во-первых, его естественная механическая характеристика – это не кривая постоянства мощности. Потому что возбуждение асинхронного двигателя осуществляется через статор. А поэтому в зоне ослабления поля при постоянстве напряжения (когда на инверторе оно закончилось) подъем частоты в два раза приводит к падению тока возбуждения в два раза и моментоообразующего тока тоже в два раза. А так как момент на двигателе – это произведение тока на поток, то момент падает в 4 раза, а мощность, соответственно, в два. Вторая проблема – это потери в роторе при перегрузке с большим моментом. В асинхронном двигателе половина потерь выделяется в роторе, половина в статоре. Для уменьшения массогабаритных показателей на транспорте часто применяется жидкостное охлаждение. Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Здесь нужно отметить, как мастерски обе проблемы асинхронного двигателя обошли в Тесла в своей Model S. Проблему с отводом тепла из ротора они решили… заведя во вращающийся ротор жидкость (у них есть соответствующий патент, где вал ротора полый и он омывается внутри жидкостью, но достоверно я не знаю, применяют ли они это). А вторую проблему с резким уменьшением момента при ослаблении поля… они не решали. Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540кВт, а 300кВт. Зона ослабления поля в тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300кВт), просто его искусственно задушили электроникой бы под возможности батареи.
Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540кВт, а 300кВт. Зона ослабления поля в тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300кВт), просто его искусственно задушили электроникой бы под возможности батареи.
А теперь ВИПы. Что могут они? Какая тяговая характеристика у них? Про ВИД СВ я точно сказать не могу – это по своему принципу работы нелинейный двигатель, и от проекта к проекту его механическая характеристика может сильно меняться. Но в целом он скорее всего лучше асинхронного двигателя в плане приближения к желаемой тяговой характеристике с постоянством мощности. А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
Так что же? ВИД НВ – идеальная машина для тяги без единой проблемы? На самом деле нет. Проблем у него тоже куча. Например, его обмотка возбуждения, которая «висит» между пакетами статора. Хоть она и не вращается, от неё тоже сложно отводить тепло – получается ситуация почти как ротором асинхронника, лишь немного получше. Можно, в случае надобности, «кинуть» трубку охлаждения со статора. Вторая проблема – это завышенные массогабаритные показатели. Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
А также есть еще общая проблема обоих типов ВИД. Их ротор – пароходное колесо. И на высоких частотах вращения (а высокая частота нужна, так высокочастотные машины при той же мощности меньше тихоходных) потери от перемешивания воздуха внутри становятся очень значительными. Если до 5000-7000 об/мин ВИД еще можно сделать, то на 20000 об/мин это получится большой миксер. А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
Так что же лучше всего в итоге для электротяги? Какой двигатель самый лучший?
Понятия не имею. Все плохие. Надо изобретать дальше. Но мораль статьи такова – если вы хотите сравнить между собой разные типы регулируемого электропривода, то нужно сравнивать на конкретной задаче с конкретной требуемой механической характеристикой по всем-всем параметрам, а не просто по мощности. Также в этой статье не рассмотрены еще куча нюансов сравнения. Например, такой параметр как длительность работы в каждой из точек механической характеристики. На максимальном моменте обычно ни одна машина не может работать долго – это режим перегрузки, а на максимальной скорости очень плохо себя чувствуют синхронные машины с магнитами – там у них огромные потери в стали. А еще интересный параметр для электротяги – потери при движении выбегом, когда водитель отпустил газ. Если ВИПы и асинхронные двигатели будут крутиться как болванки, то у синхронной машины с постоянными магнитами останутся почти номинальные потери в стали из-за магнитов. И так далее, и так далее…
И так далее, и так далее…
Поэтому нельзя вот так просто взять и выбрать лучший электропривод.
UPD:
Обобщая замечания в комментариях, необходимо дополнить некоторые важные, как оказалось, вещи, которые я изначально опустил как маловажные.
1. Асинхронные двигатели до эры преобразователей частоты регулировали за счет применения так называемого фазного ротора — когда ротор делался в виде обмотки, а не беличьей клетки, а через контактные кольца (как у синхронной машины) фазы ротора выводились наружу. Включая в цепь ротора резисторы можно было мягко пускать АД и безопасно регулировать частоту вращения, изменяя сопротивление. Проблема в том, что очень много энергии при этом терялось в резисторах — иногда до половины от подводимой к приводу мощности.
2. В статье не упомянуты синхронные реактивные машины и их совмещение с синхронными машинами с постоянными магнитами. Если сделать ротор синхронной машины с магнитами явнополюсным — например таким, как нарисован ротор SRD двигателя на gif анимации, то развиваемый момент может быть не только активным, но и реактивным — как у SRD. Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
3. Шаговые двигатели не рассмотрены, потому что по принципу действия они в первом приближении схожи либо с синхронными машинами с постоянными магнитами, либо с SRD двигателями — зависит от конкретного типа шаговика. Только шаговые двигатели, в отличие от «силовых» приводов, имеют гораздо большее количество пар полюсов (зубцов) для увеличения коэффициента электрической редукции: чтобы одному периоду тока соответствовало меньшее угловое перемещение вала. Управление шаговиками обычно тривиальное — последовательный перебор фаз друг за другом (шаги). Более продвинутые системы дробят шаг, подавая в двигатель «микрошаги» — по сути приближая управление к синусоидальному. Еще более продвинутые используют датчик положения ротора и применяют полноценное векторное управление. Но в таком случае и машину нужно делать более качественную, а называться в сумме это будет уже настоящим сервоприводом.
Но в таком случае и машину нужно делать более качественную, а называться в сумме это будет уже настоящим сервоприводом.
Классификация электродвигателей
В зависимости от назначения, от предполагаемых режимов и условий работы, от типа питания и т. д., все электродвигатели можно классифицировать по нескольким параметрам: по принципу получения рабочего момента, по способу работы, по роду тока питания, по способу управления фазами, по типу возбуждения и т. д. Давайте же рассмотрим классификацию электродвигателей более подробно.
Возникновение вращающего момента
Вращающий момент в электродвигателях может быть получен одним из двух способов: по принципу магнитного гистерезиса либо чисто магнитоэлектрически. Гистерезисный двигатель получает вращающий момент посредством явления гистерезиса во время перемагничивания магнитно-твердого ротора, в то время как у магнитоэлектрического двигателя вращающий момент является результатом взаимодействия явных магнитных полюсов ротора и статора.
Магнитоэлектрические двигатели по праву составляют сегодня львиную долю всего обилия электродвигателей, применяемых в очень многих областях. Они подразделяются по роду питающего тока на: двигатели постоянного тока, двигатели переменного тока и универсальные двигатели.
В отличие от магнитоэлектрического двигателя, в гистерезисном двигателе допускается перемещение намагниченности ротора относительно его геометрических осей, и именно данная особенность не позволяет распространять на синхронный режим работы гистерезисного двигателя общие закономерности магнитоэлектрического преобразования.
Двигатели постоянного тока
У двигателя, который питается постоянным током, за переключение фаз отвечает сам двигатель. Это значит, что хотя на электрическую машину и подается постоянный ток, тем не менее, благодаря действию внутренних механизмов устройства, магнитное поле оказывается движущимся и становится в состоянии поддерживать вращающий момент ротора (как будто в обмотке статора действует переменный ток).
По способу создания движущегося магнитного поля, двигатели постоянного тока подразделяются на вентильные (бесколлекторные) и коллекторные. Бесколлекторные двигатели имеют в своей конструкции электронные инверторы, которые и осуществляют переключение фаз. Коллекторные же двигатели традиционно оснащены щеточно-коллекторными узлами, которые призваны чисто механически синхронизировать питание обмоток двигателя с вращением его движущихся частей.
Возбуждение коллекторных двигателей
Коллекторные двигатели по способу возбуждения бывают следующих видов: с независимым возбуждением от постоянных магнитов или от электромагнитов, либо с самовозбуждением. Двигатели с возбуждением от постоянных магнитов содержат магниты на роторе. Двигатели с самовозбуждением имеют на роторе специальную якорную обмотку, которая может быть включена параллельно, последовательно или смешано со специальной обмоткой возбуждения.
Двигатель пульсирующего тока
На двигатель постоянного тока похож двигатель пульсирующего тока. Отличие заключается в наличии шихтованных вставок на остове, а также дополнительных шихтованных полюсов. Кроме того, у двигателя пульсирующего тока имеется компенсационная обмотка. Применение такие двигатели находит в электровозах, где они обычно питается выпрямленным переменным током.
Отличие заключается в наличии шихтованных вставок на остове, а также дополнительных шихтованных полюсов. Кроме того, у двигателя пульсирующего тока имеется компенсационная обмотка. Применение такие двигатели находит в электровозах, где они обычно питается выпрямленным переменным током.
Двигатель переменного тока
Двигатели переменного тока, как ясно из названия, питаются током переменным. Бывают они синхронными и асинхронными.
У синхронных двигателей переменного тока магнитное поле статора движется с той же угловой скоростью, что и ротор, а у асинхронных всегда есть некое отставание (характеризующееся величиной скольжения s) — магнитное поле статора в своем движении как бы опережает ротор, который в свою очередь все время стремится его догнать.
Синхронные двигатели больших мощностей (мощностью в сотни киловатт) имеют на роторе обмотки возбуждения. Роторы менее мощных синхронных двигателей оснащены постоянными магнитами, которые и образуют полюса. Гистерезисные двигатели тоже в принципе относятся к синхронным.
Гистерезисные двигатели тоже в принципе относятся к синхронным.
Шаговые двигатели — это особая категория синхронных двигателей с высокой точностью управления скоростью вращения, вплоть до дискретного счета шагов.
Вентильные синхронные реактивные двигатели получают питание через инвертор. Смотрите по этой теме: Современные синхронные реактивные двигатели
Асинхронные двигатели переменного тока отличаются тем, что у них угловая скорость вращения ротора всегда меньше чем угловая скорость вращения магнитного поля статора. Асинхронные двигатели бывают однофазными (с пусковой обмоткой), двухфазными (к ним относится и конденсаторный двигатель), трехфазными и многофазными.
ЭлектроВести (elektrovesti.net) — новости мировой энергетики и возобновляемой энергетики Украины
| Модели двигателей | Соответствие экол. нормам | Диаметр цилиндра x ход поршня, мм | Раб. объем, л | nном, мин-1 | Ne, л. с. с. | Мкр.max, кгс*м | Мин-й удельный расход топлива, г/л.с.˙ч | Расход масла на угар, не более, % от расхода топлива | Ресурс, тыс. км пробега автомобиля | Особенности конструкции |
|---|---|---|---|---|---|---|---|---|---|---|
| 740.75-440 | Евро-4 (Правила № 49-04В1 ЕЭК ООН) | 120×130 | 11.76 | 1900 | 440 | 206 | 194.5 | 0.06 | 1000, в составе магистральных автомобилей | Дизельные, с турбонаддувом, ОНВ, электронным управлением и системами топливоподачи типа «Common Rail» и обработки отработавших газов |
| 740.74-420 | 420 | 186 | ||||||||
| 740.73-400 | 400 | 176 | ||||||||
| 740.72-360 | 360 | 157 | ||||||||
| 740.71-320 | 320 | 137 | ||||||||
| 740.70-280 | 280 | 117 | ||||||||
| 820.73-300 | Евро-4 (Правила № 49-04В1 ЕЭК ООН) | 120×130 | 11. 76 76 | 1900 | 300 | 140 | 154 | 0,17 г/(л.с•ч) | 800, в составе магистральных автомобилей | Газовые, с турбонаддувом, ОНВ, электронным управлением и системой обработки отработавших газов |
| 820.72-240 | 240 | 110 | ||||||||
| 820.74-300 | 300 | 125 | ||||||||
| 820.60-260 | 2200 | 260 | 110 | 0,33 г/(л.с•ч) | ||||||
| 820.61-261 | 95 | |||||||||
| 740.662-300 | Евро-4 (Правила № 96-02 ЕЭК ООН) | 120×130 | 11.76 | 1900 | 300 | 127 | 207 | 0.1 | 450, в составе полноприводных автомобилей | Дизельные, с турбонаддувом, ОНВ, электронным управлением и системой топливоподачи типа «Common Rail» |
740. 642-420 642-420 | 420 | 186 | ||||||||
| 740.632-400 | 400 | 176 | ||||||||
| 740.602-360 | 360 | 157 | ||||||||
| 740.612-320 | 320 | 137 | ||||||||
| 740.622-280 | 280 | 117 | ||||||||
| 740.652-260 | 260 | 112 | ||||||||
| 740.64-420 | Евро-3 (Правила № 49-04А ЕЭК ООН) | 120×130 | 11.76 | 1900 | 420 | 186 | 207 | 0.1 | 800, в составе магистральных автомобилей | Дизельные, с турбонаддувом, ОНВ и электронным управлением |
| 740.63-400 | 400 | 180 | ||||||||
| 740.60-360 | 360 | 157 | ||||||||
| 740.61-320 | 320 | 137 | ||||||||
| 740.62-280 | 280 | 118 | ||||||||
| 740.65-240 | 240 | 98 | ||||||||
| 740.30-260 | Евро-3 (Правила № 96-01 ЕЭК ООН) Евро-2 (Правила № 49-02В ЕЭК ООН) | 120×120 | 10. 86 86 | 2200 | 260 | 107 | 207 | 0.2 | 800, в составе магистральных автомобилей | Дизельные, с турбонаддувом и ОНВ |
| 740.31-240 | 240 | 93 | ||||||||
| 740.35-400 | 120×130 | 11.76 | 1900 | 400 | 157 | 201 | ||||
| 740.50-360 | 360 | 147 | ||||||||
| 740.51-320 | 320 | 127 | ||||||||
| 740.52-260 | 260 | 107 | ||||||||
| 740.53-290 | 290 | 122 | ||||||||
| 740.55-300 | 300 | 118 | ||||||||
| 740.37-400 | 400 | 176 | 204 | |||||||
| 740.38-360 | 360 | 160 | 148 | |||||||
| 740.13-260 | Евро-1 (Правила № 49-02А ЕЭК ООН) | 120×120 | 10.86 | 2200 | 260 | 93 | 207 | 0. 3 3 | 800, в составе магистральных автомобилей | Дизельные, с турбонаддувом |
| 740.11-240 | 240 | 83 | ||||||||
| 7403.10 | Евро-0 (Правила № 49-00 ЕЭК ООН) | 120×120 | 10.86 | 2600 | 260 | 80 | 155 | 0.8 | 400 | |
| 740.10-20 | 220 | 68 | 0.6 | Дизельные | ||||||
| 740.10 | 210 | 68 |
— Энергетическое образование
Двигатель — это некая машина, которая преобразует энергию топлива в некоторую механическую энергию, создавая при этом движение. Двигатели, такие как те, которые используются для управления транспортными средствами, могут работать на различных видах топлива, в первую очередь на бензине и дизельном топливе в случае автомобилей. Однако существуют некоторые альтернативные виды топлива, такие как биотопливо и природный газ..jpg) В терминологии термодинамики двигатели обычно называют тепловыми двигателями, которые создают макросопическое движение за счет тепла. [2] Тепло в этом случае происходит от сгорания топлива в двигателе, который приводит в движение поршни.
В терминологии термодинамики двигатели обычно называют тепловыми двигателями, которые создают макросопическое движение за счет тепла. [2] Тепло в этом случае происходит от сгорания топлива в двигателе, который приводит в движение поршни.
Двигатели внутреннего сгорания
- главная страница
Двигатели, используемые в транспортных средствах, известные как двигатели внутреннего сгорания, являются одними из наиболее распространенных типов двигателей, поскольку они используются в транспортных средствах, лодках, кораблях, самолетах и поездах. В этих двигателях топливо воспламеняется, и работа выполняется внутри двигателя, при этом расширяющиеся газы перемещают поршни в двигателе. [3]
С точки зрения , как макроскопическое движение создается из энергии в этих двигателях, используются два основных типа двигателей внутреннего сгорания. Наиболее распространенным типом является поршневой двигатель, в котором используется движение поршней вверх и вниз для преобразования давления расширяющихся газов во вращательное движение. [4] Как и двигатель внутреннего сгорания, паровые двигатели и двигатели Стирлинга являются типами поршневых двигателей. Другой основной тип двигателя — роторный двигатель.В этом типе двигателя вместо поршней используется вращающийся треугольный ротор для преобразования тепла от сгорания топливно-воздушной смеси в полезную работу. [5]
[4] Как и двигатель внутреннего сгорания, паровые двигатели и двигатели Стирлинга являются типами поршневых двигателей. Другой основной тип двигателя — роторный двигатель.В этом типе двигателя вместо поршней используется вращающийся треугольный ротор для преобразования тепла от сгорания топливно-воздушной смеси в полезную работу. [5]
Кроме того, двигатели внутреннего сгорания в транспортных средствах предназначены для работы на двух основных типах топлива. Разные двигатели — бензиновые и дизельные. В бензиновом двигателе воздушно-топливная смесь в двигателе воспламеняется с помощью искры от свечи зажигания. Затем это заставляет газ нагреваться и расширяться, перемещая поршни.Дизельный двигатель работает немного иначе, воспламеняя топливно-воздушную смесь за счет сжатия, а не за счет искры. [6]
Двигатели внешнего сгорания
- главная страница
Этот тип двигателя отличается от теплового двигателя внутреннего сгорания тем, что источник тепла, который они используют, отделен от жидкости, которая выполняет работу. В двигателе внутреннего сгорания источник тепла такой же, как и жидкость, выполняющая работу.Двигатель внешнего сгорания используется во многих конструкциях силовых установок. Некоторыми примерами этих двигателей являются реакторы CANDU, угольные электростанции, электростанции, работающие на природном газе, солнечные тепловые электростанции и паровозы.
В двигателе внутреннего сгорания источник тепла такой же, как и жидкость, выполняющая работу.Двигатель внешнего сгорания используется во многих конструкциях силовых установок. Некоторыми примерами этих двигателей являются реакторы CANDU, угольные электростанции, электростанции, работающие на природном газе, солнечные тепловые электростанции и паровозы.
Список литературы
- ↑ Зефирис (Ричард Уиллер). (2 ноября 2015 г.). 4StrokeEngine Ortho 3D Small.gif [Интернет]. Доступно: http://commons.wikimedia.org/wiki/File%3A4StrokeEngine_Ortho_3D_Small.gif
- ↑ Гиперфизика. (2 ноября 2015 г.). Тепловые двигатели [Онлайн]. Доступно: http://hyperphysics.phy-astr.gsu.edu/hbase/thermo/heaeng.html
- ↑ Р. Д. Найт, «Тепловые двигатели и холодильники» в физике для ученых и инженеров: стратегический подход, 3-е изд. Сан-Франциско, США: Pearson Addison-Wesley, 2008, глава 19, раздел 2, стр 530
- ↑ Infoplease. (2 ноября 2015 г.). Поршневой двигатель [Онлайн].
 Доступно: http://www.infoplease.com/encyclopedia/science/internal-combustion-engine-reciprocating-engines.html
Доступно: http://www.infoplease.com/encyclopedia/science/internal-combustion-engine-reciprocating-engines.html - ↑ Как работает материал. (2 ноября 2015 г.). Как работают роторные двигатели [Online]. Доступно: http://auto.howstuffworks.com/rotary-engine1.htm
- ↑ HowStuffWorks. (2 ноября 2015 г.). Дизельный двигатель [Интернет]. Доступно: http://auto.howstuffworks.com/engine2.htm
 Доступно: http://www.infoplease.com/encyclopedia/science/internal-combustion-engine-reciprocating-engines.html
Доступно: http://www.infoplease.com/encyclopedia/science/internal-combustion-engine-reciprocating-engines.htmlТипы двигателей
Двигатели — это машины, которые преобразуют источник энергии в физическую работу.Если вам нужно что-то передвигать, двигатель — это то, что вам нужно. Но не все двигатели сделаны одинаково, и разные типы двигателей определенно не работают одинаково.
Изображение предоставлено Little Visuals / Pixabay.Вероятно, наиболее интуитивно понятный способ различить их — это тип энергии, которую каждый двигатель использует для выработки мощности.
- Тепловые двигатели
- Двигатели внутреннего сгорания (двигатели внутреннего сгорания)
- Двигатели внешнего сгорания (ЕС двигатели)
- Реакционные двигатели
- Электродвигатели
- Физические механизмы
Тепловые двигатели
В самом широком смысле этим двигателям для перехода в движение требуется источник тепла. В зависимости от того, как они выделяют указанное тепло, это могут быть двигатели внутреннего сгорания (которые сжигают материал) или негорючие двигатели. Они действуют либо за счет прямого сгорания топлива, либо за счет преобразования жидкости для создания работы. Таким образом, большинство тепловых двигателей также частично пересекаются с химическими системами привода. Это могут быть двигатели с воздушным дыханием (которые забирают окислитель, например кислород из атмосферы) или двигатели без дыхания (с окислителями, химически связанными в топливе).
В зависимости от того, как они выделяют указанное тепло, это могут быть двигатели внутреннего сгорания (которые сжигают материал) или негорючие двигатели. Они действуют либо за счет прямого сгорания топлива, либо за счет преобразования жидкости для создания работы. Таким образом, большинство тепловых двигателей также частично пересекаются с химическими системами привода. Это могут быть двигатели с воздушным дыханием (которые забирают окислитель, например кислород из атмосферы) или двигатели без дыхания (с окислителями, химически связанными в топливе).
Двигатели внутреннего сгорания (двигатели IC) сегодня довольно распространены.Они приводят в действие автомобили, газонокосилки, вертолеты и так далее. Самый большой двигатель внутреннего сгорания может генерировать 109 000 л.с. для корабля, перевозящего 20 000 контейнеров. Двигатели внутреннего сгорания получают энергию из топлива, сжигаемого в специальной области системы, называемой камерой сгорания. В процессе сгорания образуются продукты реакции (выхлоп), общий объем которых намного превышает общий объем реагентов (топлива и окислителя). Это расширение и есть хлеб с маслом для двигателей внутреннего сгорания — это то, что на самом деле обеспечивает движение.Тепло является лишь побочным продуктом сгорания и представляет собой потраченную впустую часть запаса энергии топлива, поскольку фактически не обеспечивает никакой физической работы.
В процессе сгорания образуются продукты реакции (выхлоп), общий объем которых намного превышает общий объем реагентов (топлива и окислителя). Это расширение и есть хлеб с маслом для двигателей внутреннего сгорания — это то, что на самом деле обеспечивает движение.Тепло является лишь побочным продуктом сгорания и представляет собой потраченную впустую часть запаса энергии топлива, поскольку фактически не обеспечивает никакой физической работы.
Изображение предоставлено НАСА / Исследовательским центром Гленна. Двигатели
IC различаются по количеству «ходов» или циклов, которые каждый поршень делает для полного вращения коленчатого вала. Сегодня наиболее распространены четырехтактные двигатели, в которых реакция сгорания состоит из четырех этапов:
- Индукция или впрыск топливовоздушной смеси (карбюрата) в камеру сгорания.
- Сжатие смеси.
- Зажигание свечой зажигания или компрессия — топливо идет штанга .
- Выброс выхлопных газов.

Изображение предоставлено Дук / Викимедиа.
На каждом шаге 4-тактный поршень поочередно опускается или поднимается. Зажигание — это единственный этап, на котором в двигателе генерируется работа, поэтому на всех остальных этапах каждый поршень полагается на энергию от внешних источников (другие поршни, электростартер, ручной запуск или инерция коленчатого вала) для перемещения.Вот почему вам нужно тянуть за шнурок газонокосилки, и почему вашему автомобилю нужен исправный аккумулятор, чтобы начать работать.
Другими критериями для дифференциации двигателей внутреннего сгорания являются тип используемого топлива, количество цилиндров, общий рабочий объем (внутренний объем цилиндров), распределение цилиндров (рядные, радиальные, V-образные двигатели и т. Д.), А также мощность и мощность. -весовой выход.
Двигатели внешнего сгорания Двигатели внешнего сгорания (двигатели ЕС) хранят топливо и продукты выхлопа отдельно — они сжигают топливо в одной камере и нагревают рабочую жидкость внутри двигателя через теплообменник или стенку двигателя. В эту категорию попадает и этот великий отец промышленной революции, паровая машина.
В эту категорию попадает и этот великий отец промышленной революции, паровая машина.
В некоторых отношениях двигатели с электронным управлением работают так же, как и их аналоги на базе IC — им обоим требуется тепло, которое получается при сжигании материала. Однако есть и несколько отличий.
В двигателях EC используются жидкости, которые подвергаются тепловому расширению-сжатию или сдвигу по фазе, но чей химический состав остается неизменным. Используемая жидкость может быть газообразной (как в двигателе Стирлинга), жидкой (двигатель с органическим циклом Ренкина) или претерпевать изменение фазы (как в паровом двигателе) — для двигателей внутреннего сгорания почти всегда жидкость представляет собой жидкое топливо. и воздушная смесь, которая воспламеняется (меняет свой химический состав).Наконец, двигатели могут либо выпускать жидкость после использования, как двигатели внутреннего сгорания (двигатели с открытым циклом), либо постоянно использовать одну и ту же жидкость (двигатели с закрытым циклом).
Паровоз Стивенсона работает
Удивительно, но первые паровые машины, получившие промышленное применение, генерировали работу за счет создания вакуума, а не давления. Эти машины, получившие название «атмосферные двигатели», были громоздкими и очень неэффективными. Со временем паровые двигатели приобрели форму и характеристики, которые мы ожидаем от двигателей сегодня, и стали более эффективными — с поршневыми паровыми двигателями, использующими поршневую систему (которая все еще используется двигателями внутреннего сгорания сегодня) или составные системы двигателей, в которых повторно использовалась жидкость. в цилиндрах при понижении давления для создания дополнительной «мощности».
Сегодня паровые двигатели вышли из широкого использования: они тяжелые, громоздкие, имеют гораздо меньшую топливную эффективность и удельную мощность, чем двигатели внутреннего сгорания, и не могут так быстро менять мощность. Но если вас не беспокоит их вес, размер и вам нужен постоянный запас работы, они просто великолепны. Таким образом, ЕС в настоящее время с большим успехом используется в качестве паротурбинных двигателей для морских операций и электростанций.
Таким образом, ЕС в настоящее время с большим успехом используется в качестве паротурбинных двигателей для морских операций и электростанций.
для атомной энергетики отличается тем, что называется негорючими или внешними тепловыми двигателями , поскольку они работают по тем же принципам, что и двигатели ЕС, но не получают энергию от сгорания.
Реакционные двигателиРеакционные двигатели , в просторечии известные как реактивные двигатели , создают тягу за счет вытеснения реакционной массы. Основным принципом реактивного двигателя является третий закон Ньютона: в основном, если вы ударите чем-то с достаточной силой через заднюю часть двигателя, он вытолкнет переднюю часть вперед. И реактивные двигатели действительно хороши в этом.
Безумно хорошо в этом.Изображение предоставлено thund3rbolt / Imgur.
То, что мы обычно называем «реактивным» двигателем, прикрепленное к пассажирскому самолету Boeing, строго говоря, является воздушно-реактивным двигателем и относится к классу двигателей с турбинным двигателем. Прямоточные воздушно-реактивные двигатели, которые обычно считаются более простыми и надежными, поскольку они содержат меньше (или почти не содержат) движущихся частей, также являются воздушно-реактивными двигателями, но относятся к классу таранных двигателей. Разница между ними заключается в том, что прямоточные воздушно-реактивные двигатели полагаются на чистую скорость для подачи воздуха в двигатель, тогда как турбореактивные двигатели используют турбины для втягивания и сжатия воздуха в камеру сгорания.В остальном они функционируют в основном одинаково.
В турбореактивных двигателях воздух втягивается в камеру двигателя и сжимается вращающейся турбиной. Ramjets рисуют и сжимают его, двигаясь очень быстро. Внутри двигателя он смешивается с мощным топливом и воспламеняется. Когда вы концентрируете воздух (и, следовательно, кислород), смешиваете его с большим количеством топлива и взрываете его (таким образом, генерируя выхлоп и термически расширяя весь газ), вы получаете реакционный продукт, который имеет огромный объем по сравнению с всасываемым воздухом. Единственное место, через которое может пройти вся эта масса газов, — это задняя часть двигателя, что происходит с огромной силой.По пути он приводит в действие турбину, втягивая больше воздуха и поддерживая реакцию. И чтобы добавить оскорбления к травмам, в задней части двигателя есть метательное сопло.
Здравствуйте, я метательная форсунка. Я буду твоим проводником.Этот элемент оборудования заставляет весь газ проходить через пространство еще меньшего размера, чем он первоначально прошел, таким образом, еще больше ускоряя его в «струю» материи. Выхлоп выходит из двигателя с невероятной скоростью, в три раза превышающей скорость звука, толкая самолет вперед.
Реактивные двигатели, не работающие на воздухе, или ракетные двигатели , работают так же, как реактивные двигатели без переднего долота — потому что им не нужен внешний материал для поддержания горения. Мы можем использовать их в космосе, потому что в них есть весь необходимый окислитель, упакованный в топливо. Это один из немногих типов двигателей, в которых постоянно используется твердое топливо.
Тепловые двигатели могут быть невероятно большими или очаровательно маленькими. Но что, если все, что у вас есть, — это розетка, и вам нужно запитать свои вещи? Что ж, в таком случае вам нужно:
Электродвигатели
Ах да, чистая банда.Классические электрические двигатели бывают трех типов: магнитные, пьезоэлектрические и электростатические.
И, конечно же, привод Duracell.Магнитная, как и батарея там, наиболее часто используется из трех. Он основан на взаимодействии магнитного поля и электрического потока для создания работы. Он работает по тому же принципу, что и динамо-машина для выработки электроэнергии, но наоборот. Фактически, вы можете выработать немного электроэнергии, если вручную провернете электромагнитный двигатель.
Для создания магнитного двигателя вам понадобятся несколько магнитов и намотанный провод. Когда к обмотке подается электрический ток, он индуцирует магнитное поле, которое взаимодействует с магнитом, создавая вращение. Важно, чтобы эти два элемента были разделены, поэтому электродвигатели состоят из двух основных компонентов: статора, который является внешней частью двигателя и остается неподвижной, и ротора, который вращается внутри него. Они разделены воздушной прослойкой. Обычно магниты встроены в статор, а проводник намотан на ротор, но они взаимозаменяемы.Магнитные двигатели также оснащены коммутатором для переключения электрического потока и модуляции индуцированного магнитного поля, когда ротор вращается для поддержания вращения.
Пьезоэлектрические приводы — это типы двигателей, в которых используется свойство некоторых материалов генерировать ультразвуковые колебания под действием электрического тока для создания работы. Электростатические двигатели используют одинаковые заряды, чтобы отталкивать друг друга и вызывать вращение ротора. Поскольку в первом используются дорогие материалы, а во втором для работы требуется сравнительно высокое напряжение, они не так распространены, как магнитные приводы.
Классические электрические двигатели обладают одними из самых высоких показателей энергоэффективности среди двигателей, преобразуя до 90% энергии в работу.
Ионные приводыИонные приводы представляют собой смесь реактивного и электростатического двигателей. Этот класс приводов ускоряет ионы (плазму), используя электрический заряд для создания движения. Они не работают, если вокруг корабля уже есть ионы, поэтому они бесполезны за пределами космического вакуума.
Подруливающее устройство Холла.Изображение предоставлено NASA / JPL-Caltech.
Они также имеют очень ограниченную выходную мощность. Однако, поскольку в качестве топлива они используют только электричество и отдельные частицы газа, они были тщательно изучены для использования в космических кораблях. Deep Space 1 и Dawn успешно использовали ионные двигатели. Тем не менее, эта технология кажется наиболее подходящей для малых кораблей и спутников, поскольку след электронов, оставляемый этими двигателями, отрицательно влияет на их общую производительность.
Приводы EM / CannaeEM / Cannae Приводы используют электромагнитное излучение, содержащееся в микроволновом резонаторе, для создания доверия.Это, наверное, самый необычный из всех типов двигателей. Его даже называют «невозможным» побуждением, поскольку это нереакционный побудительный мотив, то есть он не производит никакого разряда для создания тяги, по-видимому, в обход Третьего закона.
«Вместо топлива в нем используются микроволны, отражающиеся от тщательно настроенного набора отражателей для достижения небольшой силы и, следовательно, тяги без топлива», — сообщил Андрей о поездке.
Было много споров о том, работает ли этот тип двигателя на самом деле или нет, но испытания НАСА подтвердили, что он функционально исправен.В будущем его даже обновят. Поскольку он использует только электрическую энергию для создания тяги, хотя и в небольших количествах, он кажется наиболее подходящим двигателем для исследования космоса.
Но это в будущем. Давайте посмотрим, с чего все началось. Давайте посмотрим на:
Физические двигатели
Работа этих двигателей зависит от накопленной механической энергии. Заводные двигатели , пневматические и гидравлические двигатели — все это физические приводы.
Модель Ле Плонжера с огромными баллонами с воздухом.Изображение предоставлено Национальным морским музеем.
Они не очень эффективны. Они также обычно не могут использовать большие запасы энергии. Например, заводные двигатели хранят упругую энергию в пружинах, и их нужно заводить каждый день. Пневматические и гидравлические двигатели должны иметь на себе огромные трубки со сжатой жидкостью, которые, как правило, не работают очень долго. Например, Plongeur , первая в мире подводная лодка с механическим приводом, построенная во Франции между 1860 и 1863 годами, несла поршневой воздушный двигатель, снабженный 23 танками на 12.5 баров. Они занимали огромное пространство (153 кубических метра / 5 403 кубических фута), и их хватало только для того, чтобы корабль пролетел 5 морских миль (9 км / 5,6 миль) при скорости 4 узла.
Тем не менее, физические диски, вероятно, использовались впервые. Катапульты, требушеты или тараны полагаются на этот тип двигателей. То же самое и с кранами, приводимыми в движение человеком или зверем — все они использовались задолго до любых других типов двигателей.
Это далеко не полный список всех двигателей, созданных человеком.Не говоря уже о том, что биология тоже создала побуждения — и они являются одними из самых эффективных, которые мы когда-либо видели. Но если вы прочтете все это, я почти уверен, что у вас к этому моменту заканчивается топливо. Так что отдохните, расслабьтесь, и в следующий раз, когда вы встретите двигатель, смазывайте руки и нос, исследуя его — мы рассказали вам основы.
Основы двигателя внутреннего сгорания| Министерство энергетики
Двигатели внутреннего сгорания обеспечивают исключительную управляемость и долговечность, от них в Соединенных Штатах полагаются более 250 миллионов транспортных средств по шоссе.Наряду с бензином или дизельным топливом они также могут использовать возобновляемые или альтернативные виды топлива (например, природный газ, пропан, биодизель или этанол). Их также можно комбинировать с гибридными электрическими силовыми агрегатами для повышения экономии топлива или подключаемыми гибридными электрическими системами для расширения ассортимента гибридных электромобилей.
Как работает двигатель внутреннего сгорания?
Горение, также известное как горение, является основным химическим процессом высвобождения энергии из топливно-воздушной смеси. В двигателе внутреннего сгорания (ДВС) воспламенение и сгорание топлива происходит внутри самого двигателя.Затем двигатель частично преобразует энергию сгорания в работу. Двигатель состоит из неподвижного цилиндра и подвижного поршня. Расширяющиеся газы сгорания толкают поршень, который, в свою очередь, вращает коленчатый вал. В конечном итоге это движение приводит в движение колеса транспортного средства через систему шестерен трансмиссии.
В настоящее время производятся два типа двигателей внутреннего сгорания: бензиновый двигатель с искровым зажиганием и дизельный двигатель с воспламенением от сжатия. Большинство из них представляют собой четырехтактные двигатели, а это означает, что для завершения цикла требуется четыре хода поршня.Цикл включает четыре различных процесса: впуск, сжатие, сгорание, рабочий ход и выпуск.
Бензиновые двигатели с искровым зажиганием и дизельные двигатели с воспламенением от сжатия различаются по способу подачи и воспламенения топлива. В двигателе с искровым зажиганием топливо смешивается с воздухом, а затем вводится в цилиндр во время процесса впуска. После того, как поршень сжимает топливно-воздушную смесь, искра воспламеняет ее, вызывая возгорание. Расширение дымовых газов толкает поршень во время рабочего хода.В дизельном двигателе только воздух всасывается в двигатель, а затем сжимается. Затем дизельные двигатели распыляют топливо в горячий сжатый воздух с подходящей дозированной скоростью, вызывая его возгорание.
Улучшение двигателей внутреннего сгорания
За последние 30 лет исследования и разработки помогли производителям снизить выбросы ДВС определенных загрязняющих веществ, таких как оксиды азота (NOx) и твердые частицы (PM), более чем на 99%, чтобы соответствовать стандартам выбросов EPA. . Исследования также привели к улучшению характеристик ДВС (мощность в лошадиных силах и время разгона 0-60 миль в час) и эффективности, помогая производителям поддерживать или увеличивать экономию топлива.
Узнайте больше о наших передовых исследованиях и разработках двигателей внутреннего сгорания, направленных на повышение энергоэффективности двигателей внутреннего сгорания с минимальными выбросами.
Как работают автомобильные двигатели | HowStuffWorks
Используя всю эту информацию, вы можете начать понимать, что существует множество различных способов улучшить работу движка. Производители автомобилей постоянно играют со всеми перечисленными ниже параметрами, чтобы сделать двигатель более мощным и / или более экономичным.
Увеличьте рабочий объем: Чем больше рабочий объем, тем больше мощность, потому что вы можете сжигать больше газа за каждый оборот двигателя. Вы можете увеличить рабочий объем, увеличив цилиндры или добавив больше цилиндров. Двенадцать цилиндров кажутся практическим пределом.
Увеличьте степень сжатия: Чем выше степень сжатия, тем больше мощность, до определенного предела. Однако чем сильнее вы сжимаете топливно-воздушную смесь, тем больше вероятность самопроизвольного воспламенения (до того, как свеча зажигания воспламенит его).Бензины с более высоким октановым числом предотвращают такое преждевременное сгорание. Вот почему высокопроизводительным автомобилям обычно нужен высокооктановый бензин — их двигатели используют более высокую степень сжатия, чтобы получить больше мощности.
Добавьте больше в каждый цилиндр: Если вы можете втиснуть больше воздуха (и, следовательно, топлива) в цилиндр заданного размера, вы можете получить больше мощности от цилиндра (точно так же, как если бы вы увеличили размер цилиндр) без увеличения количества топлива, необходимого для сгорания.Турбокомпрессоры и нагнетатели сжимают входящий воздух, чтобы эффективно втиснуть больше воздуха в цилиндр.
Охлаждение поступающего воздуха: Сжатие воздуха повышает его температуру. Однако вы хотите, чтобы в цилиндре был как можно более холодный воздух, потому что чем горячее воздух, тем меньше он будет расширяться при сгорании. Поэтому многие автомобили с турбонаддувом и наддувом имеют интеркулер . Интеркулер — это специальный радиатор, через который проходит сжатый воздух, чтобы охладить его перед попаданием в цилиндр.
Позвольте воздуху поступать более легко: Когда поршень опускается на такте впуска, сопротивление воздуха может лишить двигатель мощности. Сопротивление воздуха можно значительно уменьшить, установив по два впускных клапана в каждый цилиндр. В некоторых новых автомобилях также используются полированные впускные коллекторы для устранения там сопротивления воздуха. Большие воздушные фильтры также могут улучшить воздушный поток.
Позвольте выхлопу легче выходить: Если сопротивление воздуха затрудняет выход выхлопных газов из цилиндра, это лишает двигатель мощности.Сопротивление воздуха можно уменьшить, добавив второй выпускной клапан к каждому цилиндру. Автомобиль с двумя впускными и двумя выпускными клапанами имеет четыре клапана на цилиндр, что улучшает рабочие характеристики. Когда вы слышите объявление об автомобиле, в котором говорится, что автомобиль имеет четыре цилиндра и 16 клапанов, в рекламе говорится, что двигатель имеет четыре клапана на цилиндр.
Если выхлопная труба слишком мала или глушитель имеет большое сопротивление воздуха, это может вызвать противодавление, которое имеет тот же эффект. В высокоэффективных выхлопных системах используются коллекторы, большие выхлопные трубы и глушители со свободным потоком для устранения противодавления в выхлопной системе.Когда вы слышите, что у автомобиля «двойной выхлоп», цель состоит в том, чтобы улучшить поток выхлопных газов, используя две выхлопные трубы вместо одной.
Сделайте все легче: Легкие детали помогают двигателю работать лучше. Каждый раз, когда поршень меняет направление, он использует энергию, чтобы остановить движение в одном направлении и запустить его в другом. Чем легче поршень, тем меньше энергии он потребляет. Это приводит к повышению топливной экономичности и производительности.
Впрыск топлива: Впрыск топлива позволяет очень точно дозировать топливо в каждый цилиндр.Это улучшает характеристики и экономию топлива.
В следующих разделах мы ответим на некоторые распространенные вопросы, связанные с двигателем, которые задают читатели.
ДВИГАТЕЛЬ И ДВИГАТЕЛЬ
ДВИГАТЕЛЬ И ДВИГАТЕЛЬДВИГАТЕЛЬ И ДВИГАТЕЛЬ Фред Лэндис
Автономные устройства, преобразующие электрические, химические, или ядерная энергия в механическую энергию называются двигателями и двигатели. Во многих регионах мира они заменили людей и сила животных, обеспечивающая энергией для транспортировки и вождения всевозможные машины.Химическая энергия топлива может быть преобразована путем сгорания в тепловую или тепловую энергию в тепловом двигателе. Двигатель, в свою очередь, преобразует тепловую энергию в механическую. энергия, как в двигателях с приводными валами. Когда происходит возгорание в той же единице, которая производит механическую энергию, устройство называется двигателем внутреннего сгорания. Автомобильный бензин или дизельные двигатели — это двигатели внутреннего сгорания. Паровой двигатель, с другой стороны, это двигатель внешнего сгорания котел отдельно от двигателя.Электродвигатели преобразуют электрические энергия в механическую энергию.
Тепловые двигатели
Термин тепловой двигатель включает все двигатели, производящие работа или передача энергии, работая между высокими и низкие температуры и часто между высоким и низким давлением также. Самыми распространенными тепловыми двигателями являются двигатели внутреннего сгорания. двигатели, особенно бензиновые.
Бензиновые двигатели работают на смесь воздуха и паров бензина, которая обычно втягивается в поршневой механизм и сжатый поршнем.Как объем камеры уменьшается, давление и температура внутри него увеличиваются. Вблизи точки максимального сжатия пар горючего воспламеняется от искры. Горячие газы расширяются и заставляют поршень вниз в так называемом рабочем ходе, обеспечивая работать через шток поршня к коленчатому валу. Остаточные газы затем изгоняются, и процесс повторяется.
В обычно используемом четырехтактном двигателе компрессия и процесс расширения происходит за один оборот коленчатого вала.Первый ход называется тактом впуска, второй — тактом сжатия. Инсульт. Во время второго оборота следует рабочий ход. ходом выхлопа, когда отработанные газы выбрасываются. потом втягивается смесь свежего воздуха и паров бензина. В двухтактных двигателях выхлоп происходит в конце рабочего такта, в то время как свежая воздушно-бензиновая смесь вводится вначале такта сжатия. Большинство двухтактных двигателей ограничены к небольшим двигателям, таким как те, которые используются в газонокосилках и некоторых небольших мотоциклы.Двигатели инжекторного типа впрыскивают бензин в виде штрафа. распылите непосредственно перед горением. Другой тип бензинового двигателя — это вращающийся двигатель Ванкеля. Он состоит из треугольного ротора. в почти эллиптическом корпусе. Формируются воздушные камеры в форме полумесяца между ротором и корпусом служат камеры сгорания.
Дизельные двигатели Первоначально сжимать воздух до гораздо более высокого давления и температуры, чем бензиновые двигатели. Затем впрыскивается топливо и зажигается без Искра.Требуемое более высокое давление делает дизельные двигатели тяжелее. и дороже бензиновых двигателей; однако они обычно более эффективным. Они используются в основном в автобусах, грузовиках, локомотивах, и на некоторых электростанциях.
Газотурбинные двигатели использовать роторный компрессор для сжатия непрерывного потока поступающего воздух, тем самым повышая температуру воздуха. Затем воздух проходит через камеру сгорания, куда впрыскивается и сжигается топливо.Газ, находящийся под высоким давлением и температурой, расширяется. через турбину, обеспечивая мощность для привода компрессора. На выходе из турбины газы все еще имеют температуру и давление. выше наружного воздуха. В авиационном реактивном двигателе оставшиеся газ расширяется через сопло, образуя высокоскоростную струю, которая создает тягу для приведения в движение самолета. В качестве альтернативы газ, выходящий из первой турбины, может расширяться через вторую турбина, которая затем может приводить в действие электрогенератор или, в корпус реактивного двигателя, воздушный винт.Газотурбинные двигатели менее эффективны, чем дизели, но могут производить больше мощности для заданного размера. Таким образом, они часто используются для резервного питания от электрических коммунальные услуги.
Ракетные двигатели используют два химические вещества, которые при соединении выделяют химическую энергию, которая увеличивает температура и давление в ракетной камере. Горячие газы затем позволяют расширяться через сопло для создания тяги. Топливо может быть жидким или твердым. Потому что ракетные двигатели могут работать вне атмосферы Земли, они являются двигательными установками используется в космических кораблях.
Двигатели паровые внешние сгорания двигатели, которые сжигают топливо в отдельном котле для производства пара на высокое давление и температура. Затем пар расширяется возвратно-поступательно. двигатель или турбина. Пар низкого давления обычно конденсируется. поливать перед закачкой обратно в бойлер. В паре локомотив, однако, расширенный пар сдувается.
Паровые двигатели медленные, тяжелые, неэффективные и сегодня используются редко.Вместо этого современные крупные паровые электростанции использовать паровые турбины, которые могут работать при гораздо более высоких температурах и давления и может обрабатывать больше пара. Паровые турбины могут поставлять больше мощности, чем у больших дизелей, при меньших затратах.
Ионные двигатели были предлагается к космическому полету. Их источником топлива было бы легко ионизируемое вещество, такое как металлический цезий, для доставки ионов или заряженные частицы. Генератор или солнечные батареи произведут электрическое поле, которое достаточно сильно отталкивает ионы выбрасывать их из двигателя, создавая тягу.Такой двигатели будут производить очень небольшую тягу, но они должны быть в состоянии длительное время работать в межзвездном полете.
Электродвигатели
Электродвигатели состоят из двух механических частей: статор, или неподвижная часть, и ротор, или вращающаяся часть, и два набора электрических обмоток возбуждения и якоря. Электромагнитный поля, создаваемые в воздушном зазоре между статором и ротором взаимодействуют друг с другом и создают крутящий момент или крутящую силу, который вращает мотор.Выходная мощность является продуктом крутящий момент и скорость вращения. Двигатель классифицируется как двигатель постоянного тока (прямой ток) или AC (переменный ток), в зависимости от источника питания.
Асинхронные двигатели являются Наиболее широко используются двигатели переменного тока. Обмотка возбуждения обычно намотана в прорези, расположенные вокруг железного статора для образования магнитных полюсов. В обмотках статора создается вращающееся электрическое поле. наводит токи в обмотках ротора.Взаимодействие между эти два поля создают крутящий момент для вращения двигателя. Мотора скорость меняется в зависимости от нагрузки.
Синхронные двигатели работают с фиксированной скоростью независимо от нагрузки. Однофазный гистерезис двигатели используются в небольших устройствах с постоянной скоростью, таких как электрические часы и фонографы. Обмотки статора соответствуют обмоткам Индукционный двигатель. Источник поля предоставляется либо прямым током или постоянным магнитным материалом.
Двигатели постоянного тока обеспечивают крутящий момент
и управление скоростью по более низкой цене, чем блоки переменного тока, и механически
более сложный. Обмотка полюсного поля на статоре состоит из
магнитных полюсов, каждый из которых имеет множество витков, по которым проходит небольшой ток.
Обмотка якоря размещается на роторе концами каждой
катушка подключена к противоположным стержням. По мере вращения ротора удельный
катушка, по которой течет ток, изменяется, но ее расположение относительно
стационарное поле остается фиксированным.
Источник: Интерактивная энциклопедия Комптона.
Газовые и дизельные двигатели: в чем разница?
1) UTI является образовательным учреждением и не может гарантировать работу или заработную плату.
2) Для получения информации о результатах программы и другой информации посетите сайт www.uti.edu/disclosures.
3) Приблизительно 8000 из 8400 выпускников UTI в 2019 году были готовы к трудоустройству. На момент составления отчета около 6700 человек были трудоустроены в течение одного года после даты выпуска, в общей сложности 84%.В эту ставку не включены выпускники, недоступные для работы по причине продолжения образования, военной службы, здоровья, заключения, смерти или статуса иностранного студента. В ставку включены выпускники, прошедшие специализированные программы повышения квалификации, а также работающие на должностях. которые были получены до или во время обучения по ИМП, где основные должностные обязанности после окончания учебы соответствуют образовательным и учебным целям программы. UTI является образовательным учреждением и не может гарантировать работу или заработную плату.
5) Программы UTI готовят выпускников к карьере в отраслях промышленности с использованием предоставленного обучения, в первую очередь в качестве специалистов по автомобилям, дизельным двигателям, ремонту после столкновений, мотоциклам и морским техникам. Некоторые выпускники UTI устраиваются на работу в рамках своей области обучения на должности, отличные от в качестве технического специалиста, например: специалист по запчастям, специалист по обслуживанию, изготовитель, лакокрасочный отдел и владелец / оператор магазина. UTI является образовательным учреждением и не может гарантировать работу или заработную плату.
6) Достижения выпускников ИТИ могут различаться.Индивидуальные обстоятельства и заработная плата зависят от личных качеств и экономических факторов. Опыт работы, отраслевые сертификаты, местонахождение работодателя и его программы компенсации влияют на заработную плату. ИМП образовательное учреждение и не может гарантировать работу или заработную плату.
7) Для завершения некоторых программ может потребоваться более одного года.
10) Финансовая помощь, стипендии и гранты доступны тем, кто соответствует требованиям. Награды различаются в зависимости от конкретных условий, критериев и состояния.
11) См. Подробные сведения о программе для получения информации о требованиях и условиях, которые могут применяться.
12) На основе данных, собранных из Бюро статистики труда США, прогнозов занятости (2016-2026), www.bls.gov, просмотренных 24 октября 2017 года. Прогнозируемое количество годовых Вакансии по классификации должностей: Автомеханики и механики — 75 900; Специалисты по механике автобусов и грузовиков и по дизельным двигателям — 28 300 человек; Ремонтники кузовов и связанных с ними автомобилей, 17 200. Вакансии включают вакансии в связи с ростом и чистые замены.
14) Программы поощрения и соответствие критериям для сотрудников остаются на усмотрении работодателя и доступны в определенных местах. Могут применяться особые условия. Поговорите с потенциальными работодателями, чтобы узнать больше о программах, доступных в вашем районе.
15) Оплачиваемые производителем программы повышения квалификации проводятся UTI от имени производителей, которые определяют критерии и условия приемки. Эти программы не являются частью аккредитации UTI. Программы доступны в некоторых регионах.
16) Не все программы аккредитованы ASE Education Foundation.
20) Льготы VA могут быть доступны не на всех территориях университетского городка.
21) GI Bill® является зарегистрированным товарным знаком Министерства по делам ветеранов США (VA). Более подробная информация о льготах на образование, предлагаемых VA, доступна на официальном веб-сайте правительства США.
22) Грант «Приветствие за служение» доступен всем ветеранам, имеющим право на участие в программе, на всех кампусах. Программа «Желтая лента» одобрена в наших кампусах в Эйвондейле, Далласе / Форт-Уэрте, Лонг-Бич, Орландо, Ранчо Кукамонга и Сакраменто.
24) Технический институт NASCAR готовит выпускников к работе в качестве технических специалистов по обслуживанию автомобилей начального уровня. Выпускники, которые выбирают специальные дисциплины NASCAR, также могут иметь возможности трудоустройства в отраслях, связанных с гонками. Из тех выпускников 2019 года, которые взяли факультативы, примерно 20% нашли возможности, связанные с гонками. Общий уровень занятости в NASCAR Tech в 2019 году составил 84%.
25) Расчетная годовая средняя заработная плата для специалистов по обслуживанию автомобилей и механиков в Службе занятости и заработной платы Бюро статистики труда США, май 2020 г.UTI является образовательным учреждением и не может гарантировать работу или заработную плату. Достижения выпускников UTI могут быть разными. Индивидуальные обстоятельства и заработная плата зависят от личных качеств и экономических факторов. Опыт работы, отраслевые сертификаты, местонахождение работодателя и его программы компенсации влияют на заработную плату. Заработная плата начального уровня может быть ниже. Программы UTI готовят выпускников к карьере в отраслях промышленности с использованием предоставленного обучения, в первую очередь в качестве автомобильных техников. Некоторые выпускники UTI получают работу в рамках своей области обучения на должностях, отличных от технических, например, сервисный писатель, инспектор по смогу и менеджер по запасным частям.Информация о заработной плате для штата Массачусетс: средний годовой диапазон заработной платы начального уровня для лиц, работающих в качестве техников автомобильного сервиса и механиков в Содружестве. Массачусетса (49-3023) составляет от 30 308 до 53 146 долларов (данные Массачусетса по труду и развитию рабочей силы, данные за май 2019 г., просмотренные 2 июня 2021 г., https://lmi.dua.eol.mass.gov/lmi/OccupationalEmploymentAndWageSpecificOccupations#). Информация о зарплате в Северной Каролине: Согласно оценке Министерства труда США, почасовой заработок квалифицированных автомобильных техников в Северной Каролине составляет около 50% почасовой оплаты, опубликованный в мае 2021 года, и составляет 20 долларов.59. Бюро статистики труда не публикует данные о заработной плате начального уровня. Однако 25-е и 10-й процентиль почасовой оплаты труда в Северной Каролине составляют 14,55 и 11,27 долларов соответственно. (Бюро статистики труда Министерства труда, занятости и заработной платы США, май 2020 г. 2 июня 2021 г.)
26) Расчетная годовая средняя заработная плата сварщиков, резчиков, паяльщиков и брейзеров в Бюро трудовой статистики США по занятости и заработной плате, май 2020 г.UTI является образовательным учреждением и не может гарантировать работу или заработную плату. ИМП достижения выпускников могут отличаться. Индивидуальные обстоятельства и заработная плата зависят от личных качеств и экономических факторов. Опыт работы, отраслевые сертификаты, местонахождение работодателя и его программы компенсации влияют на заработную плату. Начальный уровень зарплаты могут быть ниже. Программы UTI готовят выпускников к карьере в отраслях промышленности с использованием предоставленного обучения, в первую очередь в качестве техников-сварщиков. Некоторые выпускники UTI устраиваются на работу в рамках своей области обучения на должности, отличные от технических, например сертифицированный инспектор и контроль качества.Информация о заработной плате для штата Массачусетс: средний годовой диапазон заработной платы начального уровня для лиц, работающих сварщиками, резчиками, паяльщиками и брейзерами в штате Массачусетс (51-4121) составляет от 34 399 до 48 009 долларов (данные по Массачусетсу, данные за май 2019 г., просмотренные 2 июня 2021 г., https://lmi.dua.eol.mass.gov/lmi/OccupationalEmploymentAndWageSpecificOccupations#). Информация о зарплате в Северной Каролине: Департамент США Согласно опубликованной в мае 2021 года оценке почасовой оплаты труда квалифицированных сварщиков в Северной Каролине в размере 50% почасовой оплаты труда, она составляет 20 долларов.28. Бюро статистики труда не публикует данные о заработной плате начального уровня. Однако 25-й и 10-й процентили почасовой оплаты труда в Северной Каролине — 16,97 и 14,24 доллара соответственно. (Бюро статистики труда, Министерство труда, занятости и заработной платы США, май 2020 г. Сварщики, резаки, паяльщики и брейзеры, просмотрено 2 июня 2021 г.)
27) Не включает время, необходимое для прохождения квалификационной программы предварительных требований. 18 недель плюс дополнительные 12 или 24 недели обучения, зависящего от производителя, в зависимости от производителя.
28) Расчетная годовая средняя заработная плата специалистов по ремонту автомобилей и связанных с ними ремонтных работ в Бюро трудовой статистики США по вопросам занятости и заработной платы, май 2020 г. UTI является образовательным учреждением и не может гарантировать трудоустройство или заработную плату. Выпускников ИТИ достижения могут отличаться. Индивидуальные обстоятельства и заработная плата зависят от личных качеств и экономических факторов. Опыт работы, отраслевые сертификаты, местонахождение работодателя и его программы компенсации влияют на заработную плату. Заработная плата начального уровня может быть ниже.Программы UTI готовят выпускников к карьере в отраслях промышленности с использованием предоставленного обучения, в первую очередь в качестве техников по ремонту после столкновений. Некоторые выпускники UTI устраиваются на работу в рамках своей области обучения на должности, отличные от технических, например оценщик, оценщик и инспектор. Информация о заработной плате для Содружества Массачусетс: средний годовой диапазон заработной платы начального уровня для лиц, работающих в качестве ремонтников автомобилей и связанных с ними ремонтных работ (49-3021) в Содружестве Массачусетс составляет от 30 765 до 34 075 долларов (данные по Массачусетсу и развитию рабочей силы, май 2019 г., просмотрено 2 июня 2021 г., https: // lmi.dua.eol.mass.gov/lmi/OccupationalEmploymentAndWageSpecificOccupations#). Информация о зарплате в Северной Каролине: Департамент США Оценка рабочей силы из средних 50% почасовой заработной платы квалифицированных специалистов по борьбе с авариями в Северной Каролине, опубликованная в мае 2021 года, составляет 23,40 доллара США. Бюро статистики труда не публикует данные о заработной плате начального уровня. Однако 25-й и 10-й процентили почасовой оплаты труда в Северной Каролине составляет 17,94 доллара и 13,99 доллара соответственно. (Бюро статистики труда Министерства труда, занятости и заработной платы США, май 2020 г.)Специалисты по ремонту кузовов и связанных с ними автомобилей, дата просмотра — 2 июня 2021 г.)
29) Расчетная годовая средняя заработная плата механиков автобусов и грузовиков и специалистов по дизельным двигателям в Службе занятости и заработной платы Бюро статистики труда США, май 2020 г. UTI — образовательный учреждение и не может гарантировать трудоустройство или зарплата. Достижения выпускников UTI могут быть разными. Индивидуальные обстоятельства и заработная плата зависят от личных качеств и экономических факторов. Опыт работы, отраслевые сертификаты, местонахождение работодателя и его программы компенсации влияют на заработная плата.Заработная плата начального уровня может быть ниже. Программы UTI готовят выпускников к карьере в отраслях промышленности с использованием предоставленного обучения, в первую очередь в качестве дизельных техников. Некоторые выпускники UTI устраиваются на работу в рамках своей области обучения на должности, отличные от дизельных. техник по грузовикам, например техник по обслуживанию, техник по локомотиву и техник по морскому дизелю. Информация о заработной плате для штата Массачусетс: средний годовой диапазон заработной платы начального уровня для лиц, работающих в качестве механиков автобусов и грузовиков. и специалистов по дизельным двигателям (49-3031) в Содружестве Массачусетса составляет от 34 323 до 70 713 долларов (Массачусетс, рабочая сила и развитие рабочей силы, данные за май 2019 г., просмотренные 2 июня 2021 г., https: // lmi.dua.eol.mass.gov/lmi/OccupationalEmploymentAndWageSpecificOccupations#). Информация о зарплате в Северной Каролине: по оценке Министерства труда США почасовая оплата в среднем 50% для квалифицированных дизельных техников в Северной Каролине, опубликованная в мае 2021 года, составляет 23,20 доллара. Бюро статистики труда не публикует данные начального уровня. данные о зарплате. Однако 25-й и 10-й процентили почасовой оплаты труда в Северной Каролине составляют 19,41 и 16,18 долларов соответственно. (Бюро статистики труда Министерства труда, занятости и заработной платы США, май 2020 г.)Автобусы и грузовики и специалистов по дизельным двигателям, дата просмотра — 2 июня 2021 г.)
30) Расчетная годовая средняя зарплата механиков мотоциклов в Профессиональной занятости и заработной плате Бюро статистики труда США, май 2020 г. MMI является образовательным учреждением и не может гарантировать трудоустройство или зарплату . Достижения выпускников ММИ может различаться. Индивидуальные обстоятельства и заработная плата зависят от личных качеств и экономических факторов. Опыт работы, отраслевые сертификаты, местонахождение работодателя и его программы компенсации влияют на заработную плату.Заработная плата начального уровня может быть ниже. Программы MMI готовят выпускников к карьере в отраслях промышленности с использованием предоставленного обучения, в первую очередь в качестве техников мотоциклов. Некоторые выпускники MMI получают работу в рамках своей области обучения на должностях, отличных от технических, например, сервисный писатель, оборудование. обслуживание и запчасти. Информация о заработной плате для Содружества Массачусетс: Средняя годовая заработная плата начального уровня для лиц, работающих в качестве механиков мотоциклов (49-3052) в Содружестве Массачусетса, составляет 30 157 долларов (штат Массачусетс). Рабочая сила и развитие трудовых ресурсов, данные за май 2019 г., просмотр 2 июня 2021 г., https: // lmi.dua.eol.mass.gov/lmi/OccupationalEmploymentAndWageSpecificOccupations#). Информация о зарплате в Северной Каролине: Министерство труда США оценивает почасовую оплату средние 50% для квалифицированных мотоциклистов в Северной Каролине, опубликованные в мае 2021 года, составляют 15,94 доллара. Бюро статистики труда не публикует данные о заработной плате начального уровня. Однако 25-й и 10-й процентили почасовой оплаты труда в Северной Каролине составляют 12,31 и 10,56 долларов соответственно. (Бюро статистики труда Министерства труда, занятости и заработной платы США, май 2020 г.)Motorcycle Mechanics, просмотрено 2 июня 2021 г.)
31) Расчетная годовая средняя заработная плата механиков и техников по обслуживанию моторных лодок в Службе занятости и заработной платы Бюро статистики труда США, май 2020 г. MMI является образовательным учреждением и не может гарантировать трудоустройство или трудоустройство. зарплата. Достижения выпускников ММИ могут быть разными. Индивидуальные обстоятельства и заработная плата зависят от личных качеств и экономических факторов. Опыт работы, отраслевые сертификаты, местонахождение работодателя и его программы компенсации влияют на заработную плату.Заработная плата начального уровня может быть ниже. Программы MMI готовят выпускников к карьере в отраслях промышленности с использованием предоставленного обучения, в первую очередь в качестве морских техников. Некоторые выпускники MMI получают работу в рамках своей области обучения на должностях, отличных от технических, такие как обслуживание оборудования, инспектор и помощник по запасным частям. Информация о заработной плате для штата Массачусетс: средний годовой диапазон заработной платы начального уровня для лиц, работающих в качестве механиков моторных лодок и техников по обслуживанию (49-3051) в Содружество Массачусетса стоит от 30 740 до 41 331 долларов США (Массачусетский труд и развитие рабочей силы, данные за май 2019 г., просмотренные 2 июня 2021 г., https: // lmi.dua.eol.mass.gov/lmi/OccupationalEmploymentAndWageSpecificOccupations#). Информация о зарплате в Северной Каролине: Согласно оценке Министерства труда США почасовой заработной платы в размере 50% квалифицированного морского техника в Северной Каролине, опубликованной в мае 2021 года, она составляет 18,61 доллара. Бюро статистики труда не публикует данные о заработной плате начального уровня. Однако 25-е и 10-й процентиль почасовой оплаты труда в Северной Каролине составляет 15,18 и 12,87 долларов соответственно. (Бюро статистики труда Министерства труда, занятости и заработной платы США, май 2020 г.)Механики моторных лодок и техники по обслуживанию, просмотр в июне 2, 2021.)
33) Курсы различаются в зависимости от кампуса. Для получения подробной информации свяжитесь с представителем программы в кампусе, в котором вы заинтересованы.
34) Расчетная годовая средняя заработная плата операторов компьютерных инструментов с числовым программным управлением в Службе занятости и заработной платы Бюро статистики труда США, май 2020 года. UTI является образовательным учреждением и не может гарантировать работу или заработную плату. Достижения выпускников UTI могут быть разными.Индивидуальные обстоятельства и заработная плата зависят от личных качеств и экономических факторов. Опыт работы, отраслевые сертификаты, местонахождение работодателя и его программы компенсации влияют на заработную плату. Заработная плата начального уровня может быть ниже. Программы UTI готовят выпускников к карьере в отраслях промышленности с использованием предоставленного обучения, в первую очередь в качестве технических специалистов по обработке с ЧПУ. Некоторые выпускники UTI получают работу в рамках своей области обучения на должностях, отличных от технических, такие как оператор ЧПУ, ученик машиниста и инспектор обработанных деталей.Информация о заработной плате для штата Массачусетс: средняя годовая заработная плата начального уровня для лиц, работающих в качестве операторов станков с компьютерным управлением, металлообработки и Пластик (51-4011) в Содружестве Массачусетса стоит 37 638 долларов (данные Массачусетса по труду и развитию рабочей силы, данные за май 2019 г., просмотренные 2 июня 2021 г., https://lmi.dua.eol.mass.gov/lmi/OccupationalEmploymentAndWageSpecificOccupations#). Северная Каролина Информация о зарплате: Министерство труда США оценивает почасовую заработную плату в размере 50% для квалифицированных станков с ЧПУ в Северной Каролине, опубликованную в мае 2021 года, и составляет 20 долларов.24. Бюро статистики труда не публикует данные о заработной плате начального уровня. Тем не мение, 25-й и 10-й процентили почасовой оплаты труда в Северной Каролине составляют 16,56 и 13,97 долларов соответственно. (Бюро статистики труда Министерства труда, занятости и заработной платы США, май 2020 г., Операторы компьютерных инструментов с числовым программным управлением, просмотрено 2 июня 2021 г.)
37) Курсы Power & Performance не предлагаются в Техническом институте NASCAR. UTI является образовательным учреждением и не может гарантировать работу или заработную плату.Информацию о результатах программы и другую информацию можно найти на сайте www.uti.edu/disclosures.
38) Бюро статистики труда США прогнозирует, что к 2029 году общая занятость в каждой из следующих профессий составит: Техники и механики автомобильного сервиса — 728 800; Сварщики, резаки, паяльщики и паяльщики — 452 500 человек; Автобусы и грузовики и специалисты по дизельным двигателям — 290 800 человек; Ремонтники кузовов автомобилей и сопутствующие товары — 159 900; и операторы инструментов с ЧПУ, 141 700.См. Таблицу 1.2 Занятость в разбивке по профессиям, 2019 г. и прогноз на 2029 г. Бюро статистики труда США, www.bls.gov, дата просмотра — 3 июня 2021 г. UTI является образовательным учреждением и не может гарантировать работу или заработную плату.
39) Повышение квалификации доступно выпускникам только в том случае, если курс еще доступен и есть места. Студенты несут ответственность за любые другие расходы, такие как оплата лабораторных работ, связанных с курсом.
41) Для специалистов по обслуживанию автомобилей и механиков U.Бюро статистики труда прогнозирует в среднем 61 700 вакансий в год в период с 2019 по 2029 год. Открытые вакансии включают вакансии, связанные с чистыми изменениями в занятости и чистыми замещениями. См. Таблицу 1.10. Временное увольнение и вакансии, прогнозируемые на 2019–29 годы, Бюро статистики труда США, www.bls.gov, просмотрено 3 июня 2021 г. учреждение и не может гарантировать работу или заработную плату.
42) Для сварщиков, резчиков, паяльщиков и паяльщиков Бюро статистики труда США прогнозирует в среднем 43400 вакансий в год в период с 2019 по 2029 год.Вакансии включают вакансии, связанные с чистым изменением занятости и чистым замещением. См. Таблицу 1.10 Профессиональные увольнения и вакансии, прогноз на 2019–29 гг., Бюро статистики труда США, www.bls.gov, дата просмотра 3 июня 2021 г. UTI — образовательное учреждение и не может гарантировать работу или зарплату.
43) Для механиков автобусов и грузовиков и специалистов по дизельным двигателям Бюро статистики труда США прогнозирует ежегодно в среднем 24 500 вакансий в период с 2019 по 2029 годы. Вакансии включают вакансии, связанные с чистыми изменениями в занятости и чистыми заменами.См. Таблицу 1.10. Временное увольнение и вакансии, прогнозируемые на 2019–29 годы, Бюро статистики труда США, www.bls.gov, просмотрено 3 июня 2021 г. учреждение и не может гарантировать работу или заработную плату.
44) Для ремонтников кузовов автомобилей и связанных с ними ремонтов Бюро статистики труда США прогнозирует в среднем 13 600 вакансий в год в период между 2019 и 2029 годами. Открытые вакансии включают вакансии, связанные с чистыми изменениями в занятости и чистыми замещениями. См. Таблицу 1.10. Разделения и вакансии по профессиям, прогноз на 2019–29 гг., U.S. Bureau of Labor Statistics, www.bls.gov, дата просмотра — 3 июня 2021 г. UTI — образовательное учреждение и не может гарантировать работу или зарплату.
45) Для операторов компьютерных инструментов с числовым программным управлением Бюро статистики труда США прогнозирует в среднем 11 800 вакансий в год в период с 2019 по 2029 год. Открытые вакансии включают вакансии, связанные с чистыми изменениями занятости и чистыми замещениями. Видеть Таблица 1.10 Профильные увольнения и вакансии, прогнозируемые на 2019–29 годы, Бюро статистики труда США, www.bls.gov, просмотрено 3 июня 2021 г. UTI — образовательное учреждение. и не может гарантировать работу или зарплату.
46) Студенты должны иметь средний балл не ниже 3,5 и посещаемость 95%.
47) Бюро статистики труда США прогнозирует, что к 2029 году общая численность занятых в стране для специалистов по обслуживанию автомобилей и механиков составит 728 800 человек. См. Таблицу 1.2 Занятость в разбивке по профессиям, 2019 год и прогнозируемый показатель 2029 года, Бюро статистики труда США, www.bls. gov, просмотрено 3 июня 2021 г.ИМП является учебным заведением и не может гарантировать работу или заработную плату.
48) Бюро статистики труда США прогнозирует, что общая численность занятых в стране механиков автобусов и грузовиков и специалистов по дизельным двигателям к 2029 году составит 290 800 человек. См. Таблицу 1.2 Занятость в разбивке по профессиям, 2019 год и прогнозируемый показатель 2029 года, Бюро статистики труда США, www. .bls.gov, просмотрено 3 июня 2021 г. UTI является учебным заведением и не может гарантировать работу или заработную плату.
49) У.S. Бюро статистики труда прогнозирует, что к 2029 году общая численность занятых в сфере автомобильного кузова и связанных с ним ремонтов составит 159 900 человек. См. Таблицу 1.2. Бюро статистики труда США, www.bls.gov, дата просмотра — 3 июня 2021 г. UTI является образовательным учреждением и не может гарантировать работу или заработную плату.
50) Бюро статистики труда США прогнозирует, что общая занятость сварщиков, резчиков, паяльщиков и паяльщиков в стране к 2029 году составит 452 500 человек.См. Таблицу 1.2 Занятость в разбивке по профессиям, 2019 г. и прогноз на 2029 г. Бюро статистики труда США, www.bls.gov, дата просмотра — 3 июня 2021 г. UTI является образовательным учреждением и не может гарантировать работу или заработную плату.
51) Бюро статистики труда США прогнозирует, что общая численность занятых в стране операторов компьютерных инструментов с числовым программным управлением к 2029 году составит 141 700 человек. См. Таблицу 1.2 Занятость в разбивке по профессиям, 2019 год и прогнозируемый показатель 2029 года, Бюро статистики труда США, www.bls.gov, дата просмотра — 3 июня 2021 г. UTI является учебным заведением и не может гарантировать работу или заработную плату.
52) Бюро статистики труда США прогнозирует, что среднегодовое количество вакансий по стране в каждой из следующих профессий в период с 2019 по 2029 год составит: Техники и механики автомобильного сервиса, 61 700; Механика автобусов и грузовиков и дизельный двигатель Специалисты — 24 500 человек; и сварщики, резаки, паяльщики и паяльщики — 43 400 человек. Вакансии включают вакансии, связанные с чистым изменением занятости и чистым замещением.См. Таблицу 1.10 Разделения и вакансии по профессиям, прогноз на 2019–29 гг., Бюро США. статистики труда, www.bls.gov, дата просмотра — 3 июня 2021 г. UTI является образовательным учреждением и не может гарантировать трудоустройство или заработную плату.
Универсальный технический институт штата Иллинойс, Inc. одобрен Отделом частного бизнеса и профессиональных школ Совета по высшему образованию штата Иллинойс.
Сколько типов двигателей существует в автомобиле
В этой статье мы узнаем о различных типах двигателей.Классификация двигателей зависит от типа используемого топлива, рабочего цикла, числа тактов, типа зажигания, количества цилиндров, расположения цилиндров, расположения клапанов, типов охлаждения и т. Д. Эти двигатели используются в различных областях, таких как в автомобильной, авиационной, морской промышленности и т. д. в зависимости от пригодности они используются в различных областях. Итак, давайте поговорим о различных типах двигателей один за другим.
Типы двигателейВ основном двигатели бывают двух типов: двигатели внешнего и внутреннего сгорания.
(i). Двигатель внешнего сгорания: В двигателе внешнего сгорания сгорание топлива происходит вне двигателя. Пример: паровой двигатель.
(ii). Двигатель внутреннего сгорания: В двигателе внутреннего сгорания сгорание топлива происходит внутри двигателя. Двухтактные и четырехтактные бензиновые и дизельные двигатели являются примерами двигателей внутреннего сгорания.
Существуют различные типы двигателей внутреннего сгорания (I.C.), и их классификация зависит от различных оснований.
I.C. двигатели классифицируются по следующему принципу:
1. Типы конструкции(i). Поршневой двигатель: В поршневом двигателе есть поршень и цилиндр, поршень совершает возвратно-поступательное движение (в направлении и вперед) внутри цилиндра. Из-за возвратно-поступательного движения поршня его называют поршневым двигателем. Двухтактные и четырехтактные двигатели являются типичными примерами поршневых двигателей.
(ii).Роторный двигатель: В роторном двигателе ротор совершает вращательное движение для выработки энергии. Возвратно-поступательного движения нет. В камере находится ротор, который совершает вращательное движение внутри камеры. Роторный двигатель Ванкеля, газотурбинные двигатели относятся к роторным типам двигателей.
2. Типы используемого топливаПо типам используемого топлива двигатель подразделяется на бензиновый, дизельный и газовый.
(i). Бензиновый двигатель: Двигатель, работающий на бензине, называется бензиновым двигателем.
(ii). Дизельный двигатель: Двигатель, работающий на дизельном топливе, называется дизельным двигателем.
(iii). Газовый двигатель: Двигатель, работающий на газовом топливе, называется газовым двигателем.
3. Цикл работыНа основе рабочего цикла типы двигателей следующие:
(i). Двигатель цикла Отто: Эти типы двигателей работают по циклу Отто.
(ii). Дизельный двигатель: Двигатель, работающий по дизельному циклу, называется двигателем с дизельным циклом.
(iii). Двухтактный двигатель или двигатель с полудизельным циклом: Двигатель, который работает как с дизельным двигателем, так и с циклом Отто, называется двигателем с двухтактным или полудизельным циклом.
4. Число ходовТипы двигателей на основе числа ходов:
(i). Четырехтактный двигатель: Это двигатель, в котором поршень перемещается четыре раза, то есть два движения вверх (от нижней мертвой точки к верхней мертвой точке) и два движения вниз (от верхней мертвой точки к нижней мертвой точке) за один цикл рабочего такта, называется четырехтактным двигателем.
| Четырехтактный двигатель |
(ii). Двухтактный двигатель: Двигатель, в котором поршень совершает двукратное движение, то есть одно из ВМТ в НМТ, а другое из НМТ в ВМТ для получения рабочего хода, называется двухтактным двигателем.
| Двухтактный двигатель |
(iii).Двигатель с воспламенением от горячей точки: Этот тип двигателя не используется на практике.
5. Тип зажигания По типу зажигания двигатели классифицируются как:
(i). Двигатель с искровым зажиганием (двигатель S.I.): В двигателе с искровым зажиганием на головке двигателя установлена свеча зажигания. Свеча зажигания производит искру после сжатия топлива и воспламеняет топливовоздушную смесь для сгорания. Бензиновые двигатели представляют собой двигатель с искровым зажиганием.
(ii). Двигатель с воспламенением от сжатия (двигатель C.I.): В двигателе с воспламенением от сжатия на головке блока цилиндров нет свечи зажигания. Топливо воспламеняется от тепла сжатого воздуха. Дизельные двигатели представляют собой двигатель с воспламенением от сжатия.
Также читайте:
6. Количество цилиндровНа основе количества цилиндров, имеющихся в двигателе, типы двигателей следующие:
(i). Одноцилиндровый двигатель: Одноцилиндровый двигатель называется одноцилиндровым двигателем.Обычно одноцилиндровые двигатели используются в мотоциклах, скутерах и т. Д.
(ii). Двухцилиндровый двигатель: Двухцилиндровый двигатель называется двухцилиндровым двигателем.
(iii). Многоцилиндровый двигатель: Двигатель, состоящий более чем из двух цилиндров, называется многоцилиндровым двигателем. Многоцилиндровый двигатель может иметь три, четыре, шесть, восемь, двенадцать и шестнадцать цилиндров.
7. Расположение цилиндровПо расположению цилиндров классификация двигателей:
(i).Вертикальный двигатель: в вертикальных двигателях цилиндры расположены в вертикальном положении, как показано на схеме.
(ii). Горизонтальный двигатель: В горизонтальных двигателях цилиндры расположены горизонтально, как показано на схеме, приведенной ниже.
(iii). Радиальный двигатель: Радиальный двигатель представляет собой двигатель внутреннего сгорания возвратно-поступательного типа, в котором цилиндры выходят наружу из центрального картера, как спицы колеса. Если смотреть спереди, он напоминает стилизованную звезду и называется «звездообразным» двигателем.До того, как газотурбинный двигатель не стал преобладающим, его обычно использовали для авиационных двигателей.
(iv). V-образный двигатель: В двигателях v типа цилиндры размещены в двух рядах с некоторым углом между ними. Угол между двумя рядами должен быть как можно меньше, чтобы предотвратить вибрацию и проблемы с балансировкой.
(в). Двигатель типа W: В двигателях типа w цилиндры расположены в три ряда, образуя расположение типа W. Двигатель типа W производится при выпуске 12- и 16-цилиндровых двигателей.
(vi). Двигатель с оппозитными цилиндрами: В двигателе с оппозитными цилиндрами цилиндры расположены напротив друг друга. Поршень и шатун движутся одинаково. Он работает плавно и имеет большую балансировку. Размеры оппозитно-цилиндрового двигателя увеличиваются из-за его расположения.
8. Расположение клапановВ зависимости от расположения впускного и выпускного клапана в различных положениях в головке или блоке цилиндров автомобильные двигатели подразделяются на четыре категории.Эти аранжировки обозначаются как «L», «I», «F» и «T». Легко запомнить слово «LIFT», чтобы вспомнить четырехклапанный механизм.
(i). Двигатель с L-образной головкой: В двигателях этих типов впускные и выпускные клапаны расположены рядом и приводятся в действие одним распредвалом. Цилиндр и камера сгорания образуют перевернутый L.
(ii). Двигатель с I-образной головкой: В двигателях с I-образной головкой впускные и выпускные клапаны расположены в головке цилиндров. Один клапан приводит в действие все клапаны.Эти типы двигателей в основном используются в автомобилях.
(iii). Двигатель с F-образной головкой: Это комбинация двигателей с I-образной головкой и F-образной головкой. В этом случае один впускной клапан обычно находится в головке, а выпускной клапан находится в блоке цилиндров. Оба набора клапанов приводятся в действие одним распредвалом.
(iv). Двигатель с Т-образной головкой: В двигателях с Т-образной головкой впускной клапан расположен с одной стороны, а выпускной клапан — с другой стороны цилиндра. Здесь для работы требуются два распределительных вала: один для впускного клапана, а другой — для выпускного.
Также читайте:
9. Типы охлажденияПо типам охлаждения двигатели классифицируются как:
(i). Двигатели с воздушным охлаждением: В этих двигателях воздух используется для охлаждения двигателей. В двигателях с воздушным охлаждением цилиндры разделены и используются металлические ребра, которые обеспечивают площадь излучающей поверхности, увеличивающую охлаждение. Двигатели с воздушным охлаждением обычно используются в мотоциклах и скутерах.
(ii).Двигатели с водяным охлаждением: В двигателях с водяным охлаждением вода используется для охлаждения двигателя. Двигатели с водяным охлаждением используются в легковых автомобилях, автобусах, грузовиках и других четырехколесных транспортных средствах, а также в тяжелых автотранспортных средствах. В воду добавляется антифриз, чтобы она не замерзла в холодную погоду. Каждый двигатель с водяным охлаждением имеет радиатор для охлаждения горячей воды от двигателя.
Помимо вышеуказанных типов двигателей, двигатель внутреннего сгорания также классифицируется на основании следующего.
1. Скорость:Типы двигателей в зависимости от скорости:
(i). Низкооборотный двигатель
(ii). Среднеоборотный двигатель
(iii). Высокоскоростной двигатель
По способу впрыска топлива двигатели классифицируются как:
(i). Карбюраторный двигатель
(ii). Двигатель с впрыском воздуха
(iii). Двигатель с безвоздушным или твердым впрыском топлива
(i).Двигатель с управляемым попаданием и промахом: Это тип двигателя, в котором подача топлива регулируется регулятором. Он контролирует скорость двигателя, отключая зажигание и подачу топлива в двигатель на очень высоких оборотах.
(ii). Качественно управляемый двигатель
(iii). Двигатель с количественным управлением
(i). Стационарный двигатель: Стационарный двигатель — это двигатель, в котором его каркас не движется. Он используется для привода неподвижного оборудования, такого как насос, генератор, мельница, заводское оборудование и т. Д.
(ii). Автомобильный двигатель: Это типы двигателей, которые используются в автомобильной промышленности. Например: бензиновый двигатель, дизельный двигатель, газовый двигатель — двигатели внутреннего сгорания попадают в категорию автомобильных двигателей.